L4: Parallel Computing Models
Parallelism
- Average number of units of work that can be performed in parallel per unit time
- Example: MIPS, MFLOPS, average number of threads (processes) per second
- Limits in exploiting parallelism
- Program dependencies – data dependencies, control dependencies
- Runtime – memory contention, communication overheads, thread/process overhead, synchronization (coordination)
Data Parallelism
- Same operation is applied to different elements of a data set
- If operations are independent, elements can be distributed among cores for parallel execution data parallelism
- SIMD computers / instructions are designed to exploit data parallelism
- Many algorithms perform computations by iteratively traversing a large data structure
- Commonly expressed as a loop
- If the iterations are independent, iterations can be executed in arbitrary order and in parallel on different cores
1// Parallelize the matrix multiplication (result = a x b)2// Each thread will work on one iteration of the outer-most loop3// Variables are shared among threads (a, b, result)4// and each thread has its own private copy (i, j, k)5
6#pragma omp parallel for num_threads(8) shared(a, b, result) private (i, j, k)7for (i = 0; i < size; i++)8 for (j = 0; j < size; j++)9 for (k = 0; k < size; k++)10 result.element[i][j] += a.element[i][k] * b.element[k][j];Data Parallelism on MIMD:
- Common model: SPMD
- One parallel program is executed by all cores in parallel (both shared and distributed address space)
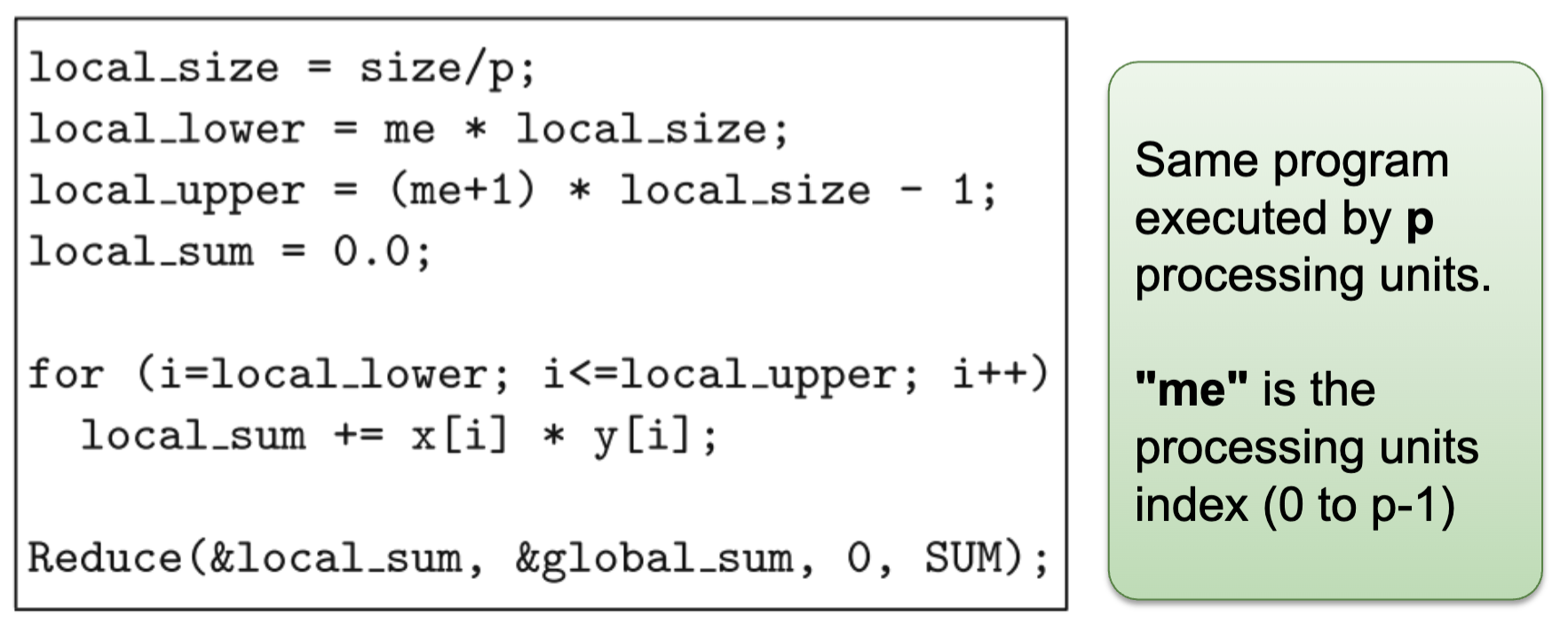
E.g: Scalar product of \vec\{x} \cdot \vec\{y} on p processing units
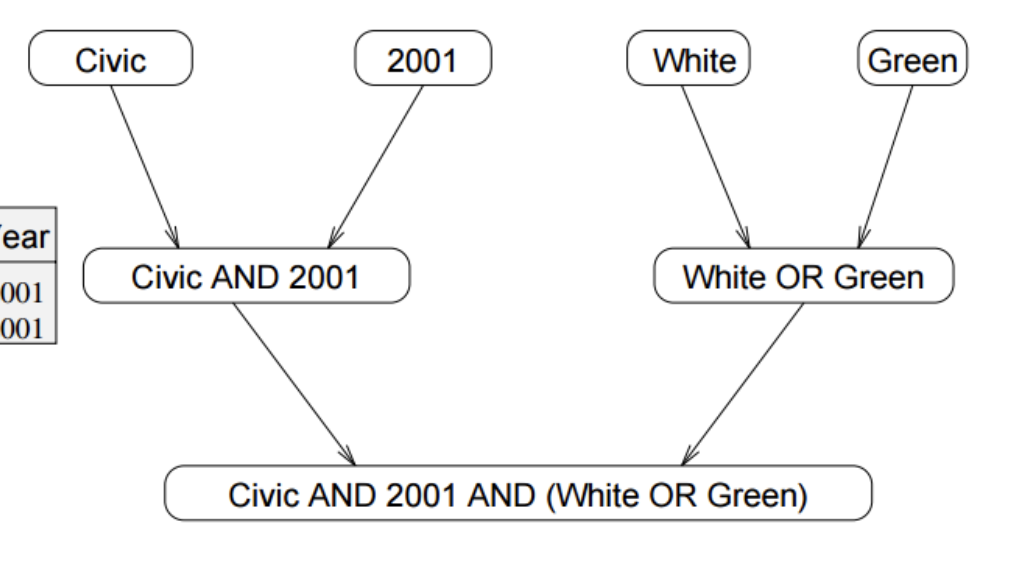
Query Model = "civic" AND Year = "2001" AND (Color = "green" OR Color = "white")
Task (Functional) Parallelism:
- Independent program parts (tasks) can be executed in parallel
- Tasks: single statement, series of statements, loops or function calls
- Further decomposition: A single task can be executed sequentially by one processing units, or in parallel by multiple processing units
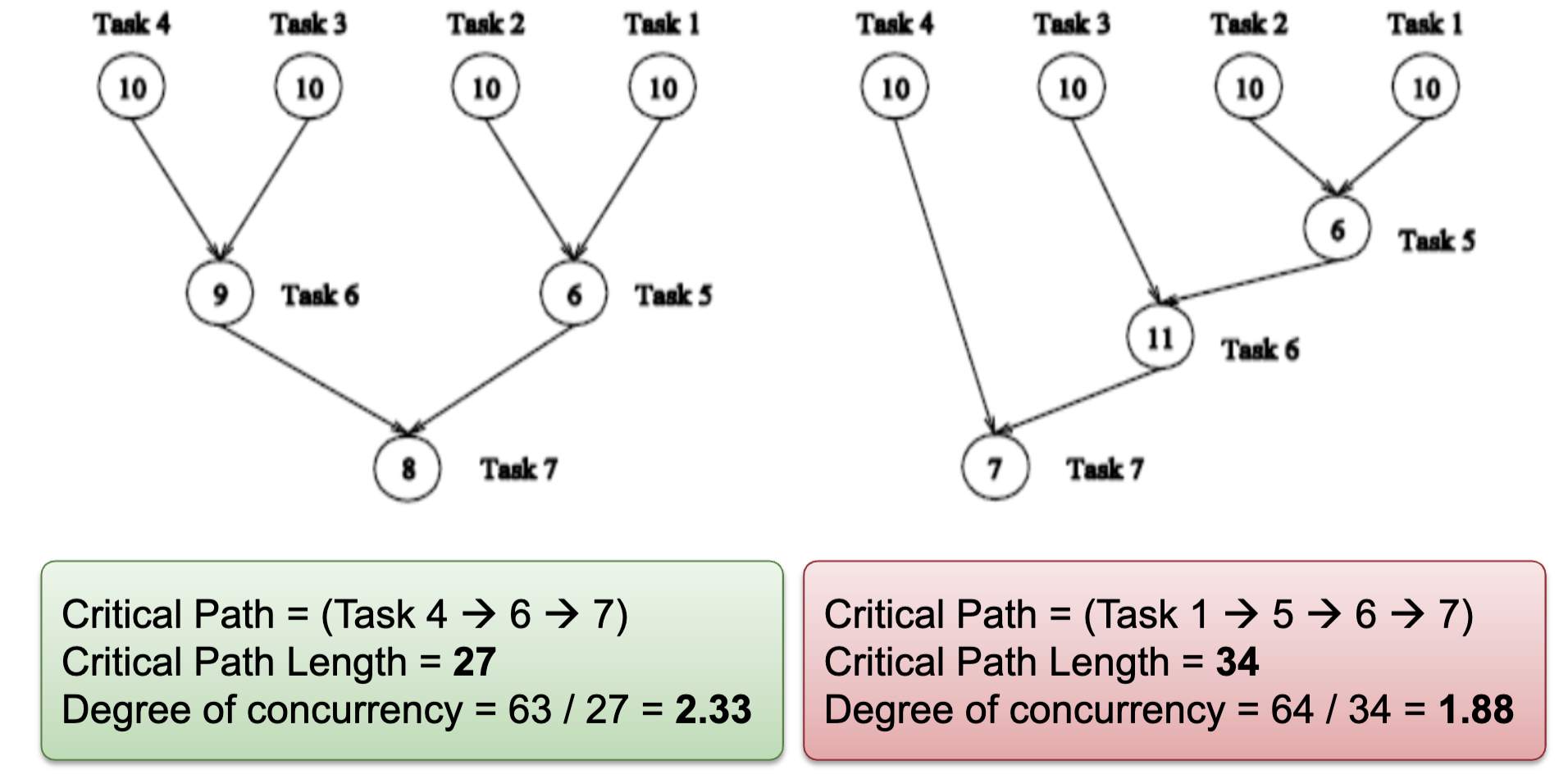
Task Dependence Graph:
- Can be used to visualize and evaluate the task decomposition strategy
- A directed acyclic graph:
- Node: Represent each task, node value is the expected execution time
- Edge: Represent control dependency between task
- Properties:
- Critical path length: Maximum completion time
- Degree of concurrency = Total Work / Critical Path Length
- An indication of amount of work that can be done concurrently
Models of Coordination
Shared Address Space
- Communication abstraction
- Tasks communicate by reading/writing from/to shared variables
- Ensure mutual exclusion via use of locks
- Logical extension of uniprocessor programming
- Requires hardware support to implement efficiently
- Any processor can load and store from any address – contention
- Even with NUMA, costly to scale
- Matches shared memory systems – UMA, NUMA, etc
Data Parallel
- Historically: same operation on each element of an array → SIMD, vector processors
- Basic structure: map a function onto a large collection of data
- Functional: side-effect-free execution
- No communication among distinct function invocations → Allows invocations to be scheduled in parallel
- Stream programming model
- Modern performance-oriented data-parallel languages do not enforce this SIMD structure anymore (SPMD instead).
- E.g: CUDA, OpenCL, ISPC
Message Passing
- Tasks operate within their own private address spaces and communicate by explicitly sending/receiving messages
- Popular software library: MPI (message passing interface)
- Hardware does not implement system-wide loads and stores
- Can connect commodity systems together to form large parallel machine
- Matches distributed memory systems → Programming model for clusters, supercomputers, etc.
- It is common to implement message-passing abstractions on shared memory machines (hardware)
- “Sending message” means copying data into message library buffers
- “Receiving message” means copying data from message library buffers
- It is possible to implement shared address space abstraction on machines that do not support it in hardware
- Less efficient software solutions
- Modify a shared variable: send messages to invalidate all (mem) pages containing the shared variable
- Reading a shared variable: page-fault handler issues appropriate network requests (messages)
Shared address space:
- very little structure
- All threads can read and write to all shared variables
- Drawback: not all reads and writes have the same cost (and that cost is not apparent in program text)
Data-parallel:
- very rigid computation structure
- Programs perform the same function on different data elements in a collection
Message passing:
- highly structured communication
- All communication occurs in the form of messages
Program Parallelization
Foster’s Design Methodology
1. Partitioning
- Divide computation and data into independent pieces to discover maximum parallelism
- Different way of thinking about problems – reveals structure in a problem, and hence opportunities for optimization
Data Centric: Domain decomposition → Data Parallelism
- Divide data into pieces of approximately equal size
- Determine how to associate computations with the data
Computation Centric: Functional decomposition → Task Parallelism
- Divide computation into pieces (tasks)
- Determine how to associate data with the computations
Partitioning Rules of Thumb:
- At least 10x more primitive tasks than cores in target computer
- Minimize redundant computations and redundant data storage
- Primitive tasks are roughly of the same size
- Number of tasks ia an increasing function of problem size
2. Communication (Coordination)
-
Tasks are intended to execute in parallel, but generally not executing independently
→ Need to determine data passed among tasks
Local communication:
- Task needs data from a small number of other tasks (“neighbors”)
- Create channels illustrating data flow
Global communication:
- Significant number of tasks contribute data to perform a computation
- Don’t create channels for them early in design
Communication Rules of Thumb:
- Communication operations balanced among tasks
- Each task communicates with only a small group of neighbors
- Tasks can perform communication in parallel
- Overlap computation with communication
3. Agglomeration
- Combine tasks into larger tasks → Number of tasks >= number of cores
- Goals:
- Improve performance (cost of task creation + communication)
- Maintain scalability of program
- Simplify programming
- Motivation: Eliminate communication between primitive tasks agglomerated into consolidated task
Agglomeration Rules of Thumb:
- Locality of parallel algorithm has increased
- Number of tasks increases with problem size
- Number of tasks suitable for likely target systems
- Tradeoff between agglomeration and code modifications costs is reasonable
4. Mapping
- Assignment of tasks to execution units
- Conflicting goals:
- Maximize processor utilization – place tasks on different processing units to increase parallelism
- Minimize inter-processor communication – place tasks that communicate frequently on the same processing units to increase locality
- Mapping may be performed by:
- OS for centralized multiprocessor
- User for distributed memory systems
Mapping Rules of Thumb:
- Finding optimal mapping is NP hard in general → Must rely on heuristic
- Consider designs based on one task per core and multiple tasks per core
- Evaluate static and dynamic task allocation
- If dynamic task allocation is chosen, the task allocator should not be a bottleneck to performance
- If static task allocation is chosen, the ratio of tasks to cores is at least 10:1
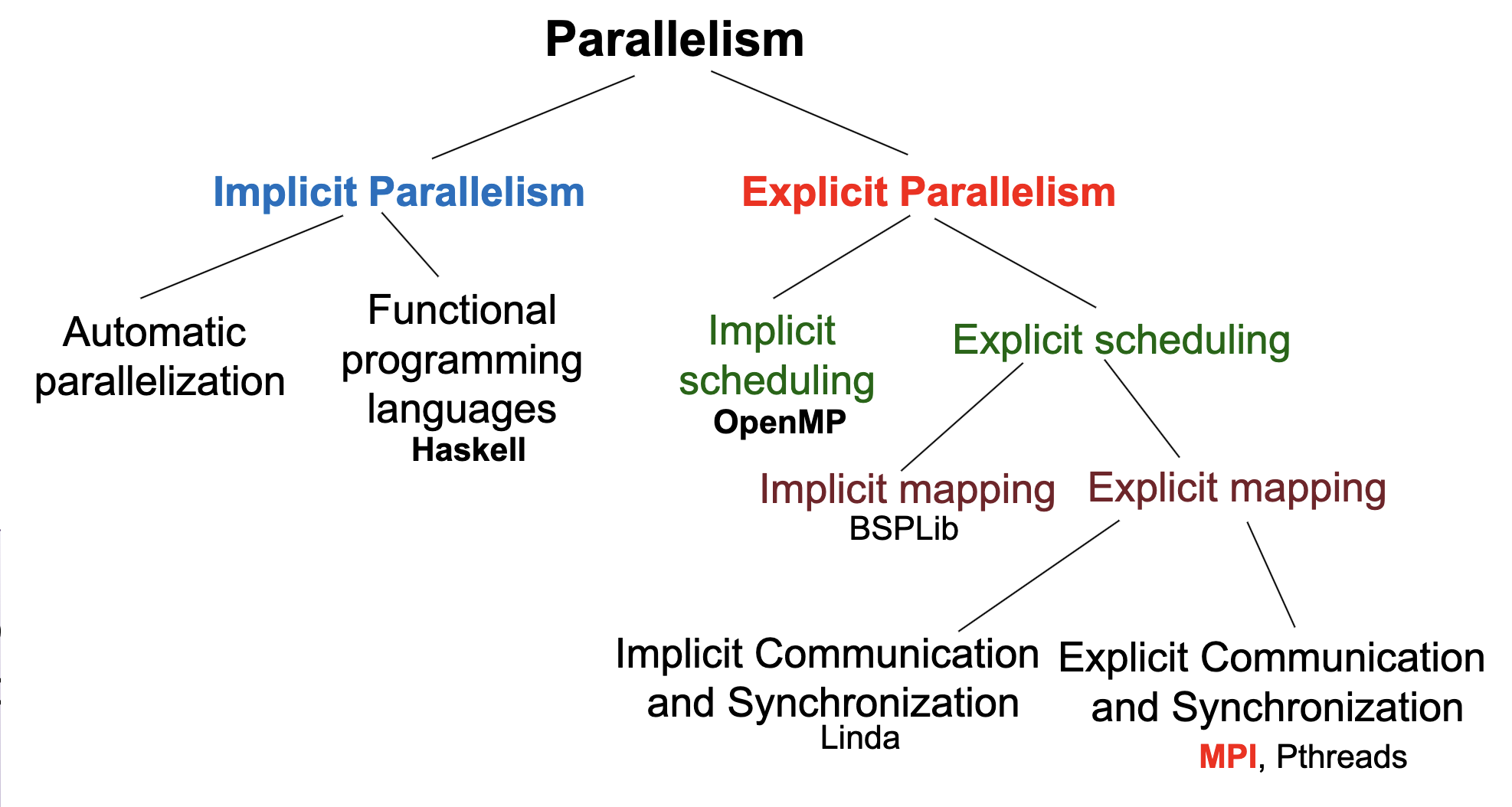
Automatic Parallelization
Parallelizing compilers perform decomposition and scheduling
Drawbacks:
- Dependence analysis is difficult for pointer based computations or indirect addressing
- Execution time of function calls or loops with unknown bounds is difficult to predict at compile time
Functional Programming Languages
Describe the computations of a program as the evaluation of mathematical functions without side effects
Advantages: New language constructs are not necessary to enable a parallel execution
Challenge: Extract the parallelism at the right level of recursion
Parallel Programming Pattern
Fork-Join
Task T creates child tasks
- Children run in parallel, but they are independent of each other
- The children can execute the same or a different program part, or function
- Children might join the parent at different times
Implementation: Processes, threads, and any paradigm that makes use of these concepts
Parbegin–Parend
Programmer specifies a sequence of statements (function calls) to be executed by a set of cores in parallel
- When an executing thread reaches a parbegin-parend construct, a set of threads is created and the statements of the construct are assigned to these threads for execution
- Usually, the threads execute the same code (function)
The statements following the parbegin-parend construct are only executed after all these threads have finished their work Like a fork-join pattern, where all forks are done at the same time, and all joins are done at the same time
Implementation: A language construct such as OpenMP or compiler directives
SIMD
Single instructions are executed synchronously by the different threads on different data
Similar to parbegin-parend, all threads execute the same instruction at the same time
Implementation: AVX/SSE Instruction on Intel processor
SPMD
Same program executed on different cores but operate on different data
- Different threads may execute different parts of the parallel program because of
- Different speeds of the executing cores
- Control statement in the program, e.g., If statement
- Similar to parbegin-parend, but SPMD is the preferred name when we do not follow the pattern
No implicit synchronization
- Synchronization can be achieved by explicit synchronization operations
Implementation: Programs running on GPGPU
Master–Worker
A single program (master) controls the execution of the program
- Master executes the main function
- Assigns work to worker threads
Master task: Generally responsible for coordination and perform initializations, timings, and output operations Worker task: Wait for instruction from master task
Task (Work) Pools
A common data structure from which threads can access to retrieve tasks for execution
Number of threads is fixed
- Threads are created statically by the main thread
- Once a task is finished, the worker thread retrieves another task from the pool
- Work is not pre-allocated to the worker threads; instead, a new task is retrieved from the pool by the worker thread
During the processing of a task, a thread can generate new tasks and insert them into the task pool
Access to the task pool must be synchronized to avoid race conditions
Execution of a parallel program is completed when
- Task pool is empty
- Each thread has terminated the processing of its last task
Advantages:
- Useful for adaptive and irregular applications
- Tasks can be generated dynamically
- Overhead for thread creation is independent of the problem size and the number of tasks
Disadvantages:
- For fine grained tasks, the overhead of retrieval and insertion of tasks becomes important
Producer–Consumer
Producer threads produce data which are used as input by consumer threads
Synchronization has to be used to ensure correct coordination between producer and consumer threads
Pipelining
Data in the application is partitioned into a stream of data elements that flows through the pipeline stages one after the other to perform different processing steps
A form of functional parallelism: Stream parallelism