L5: Performance of Parallel Systems
Performance Goals:
- Users: reduced response time → Time between the start and termination of the program
- Computer managers: high throughput
- Average number of work units executed per unit time, e.g. jobs per second, transactions per second
Execution Time
Response Time in Sequential Programs (wall-clock time): includes
- User CPU time: time CPU spends for executing program
- System CPU time: time CPU spends executing OS routines
- Waiting time: I/O waiting time and the execution of other programs because of time sharing
Considerations:
- waiting time: depends on the load of the computer system
- system CPU time: depends on the OS implementation
User CPU Time
Depends on:
-
Translation of program statements by the compiler into instructions
-
Execution time for each instruction:
- → User CPU time of a program A
- → Total number of CPU cycles needed for all instructions
- → Cycle time of CPU (clock_cycle_time = 1/clock_rate)
But instructions may have different execution times
→ For a program with n types of instructions, I1,…, In
- → number of instructions of type Ii
- → average number of CPU cycles needed for instructions of type Ii
Thus:
- → depends on the internal organization of the CPU, memory system, and compiler
- → total number of instructions executed for A, depends on the architecture of the computer system and the compiler
Include memory access time to the user time:
- → number of additional clock cycles due to memory accesses
Consider a one-level cache:
is similar
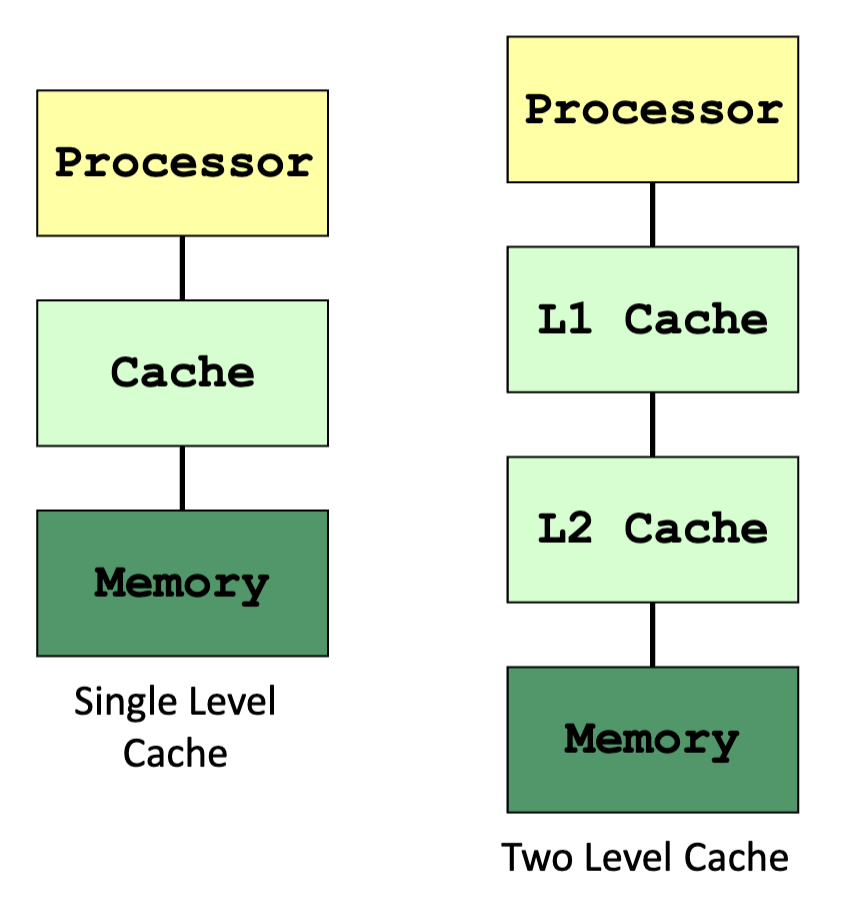
Memory Access: Illustration
Terminology:
- LLC = last level cache
- Cache line/block = each block of memory content in cache
- Mapping = mechanism used to store and locate a memory block in cache
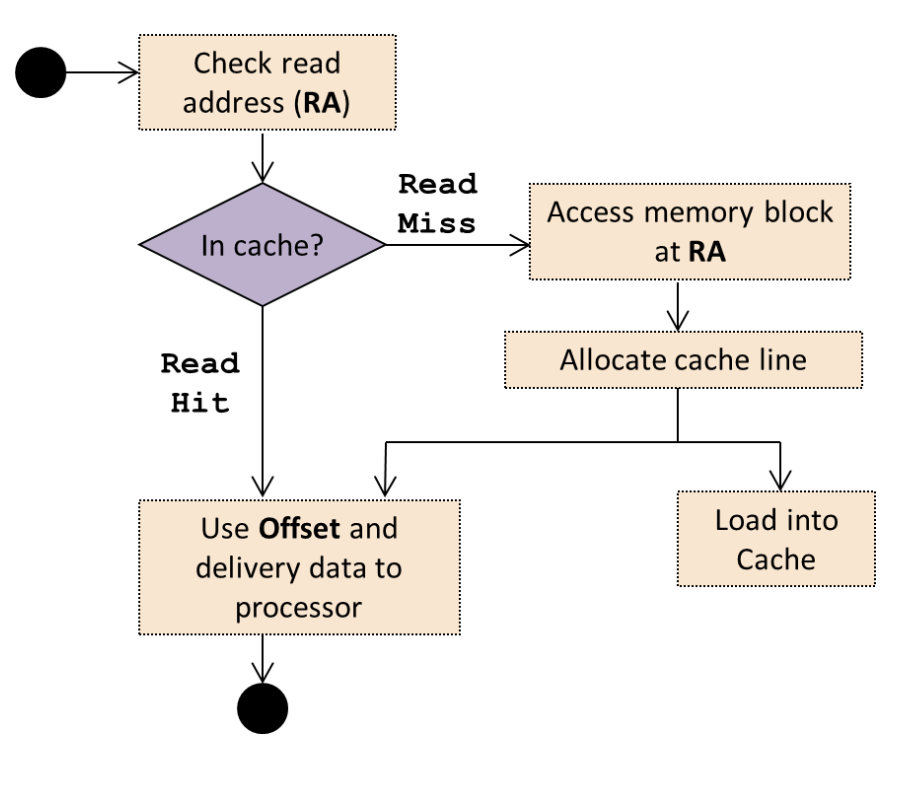
Read access (load) workflow
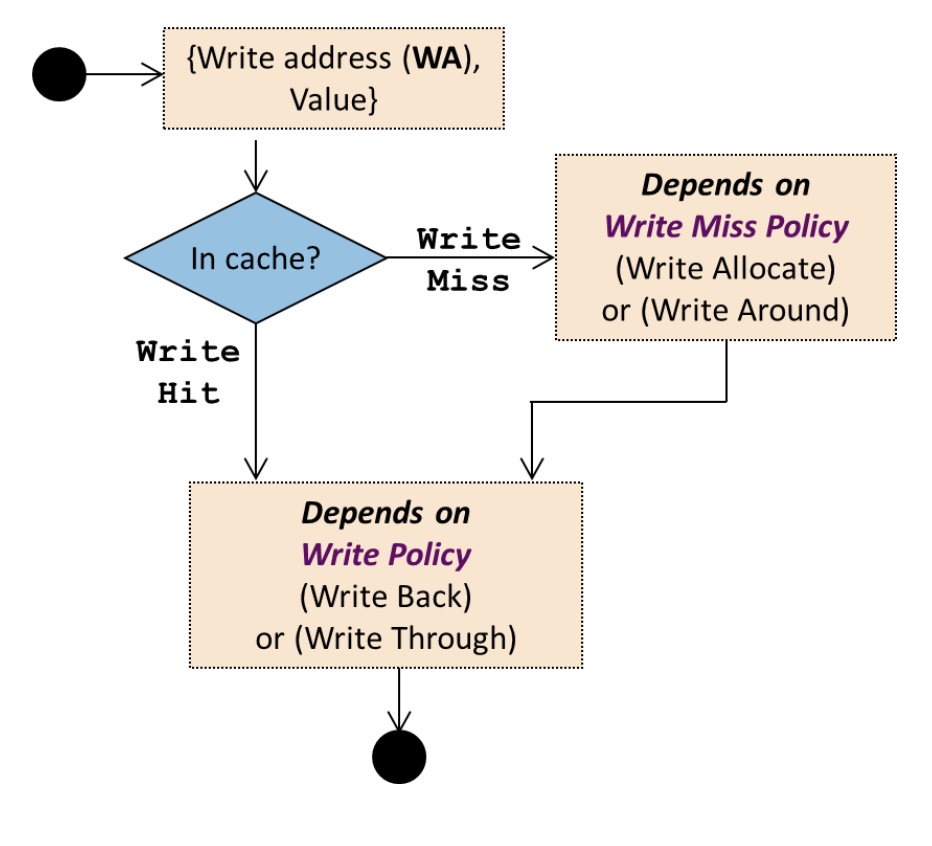
Write access (store) workflow
Refinement with Memory Access Time:
-
User time with instructions with different execution times extension:
- → total number of read or write operations
- → (read and write) miss rate
- → number of additional cycles needed for loading a new cache line
Average Memory Access Time:
- → average read access time of a program A
- → time for a read access to the cache irrespective of hit or miss (additional time is captured in misses)
- → cache read miss rate of a program A
- → read miss penalty time
- Can be applied to multiple level of cache or virtual memory
- Global miss rate:
Example:
Processor for which each instruction takes 2 cycles to execute.
The processor uses a cache for which the loading of a cache block takes 100 cycles.
Program A for which the (read and write) miss rate is 2% and in which 33% of the instructions executed are load and store operations
Scenarios – Execution time when
- No cache
- Double clock rate while the time to load a cache block doubles (200 cycles)
→ Case (2) is 21.08 times more efficient than case (1)
Throughput
Million-Instruction-Per-Second:
- Drawbacks:
- Consider only the number of instructions
- Easily manipulated (by making instruction smaller)
Million-Floating point-Operation-Per-Second:
- → number of floating-point operations in program A
- Drawback: No differentiation between different types of floating-point operations
Speedup
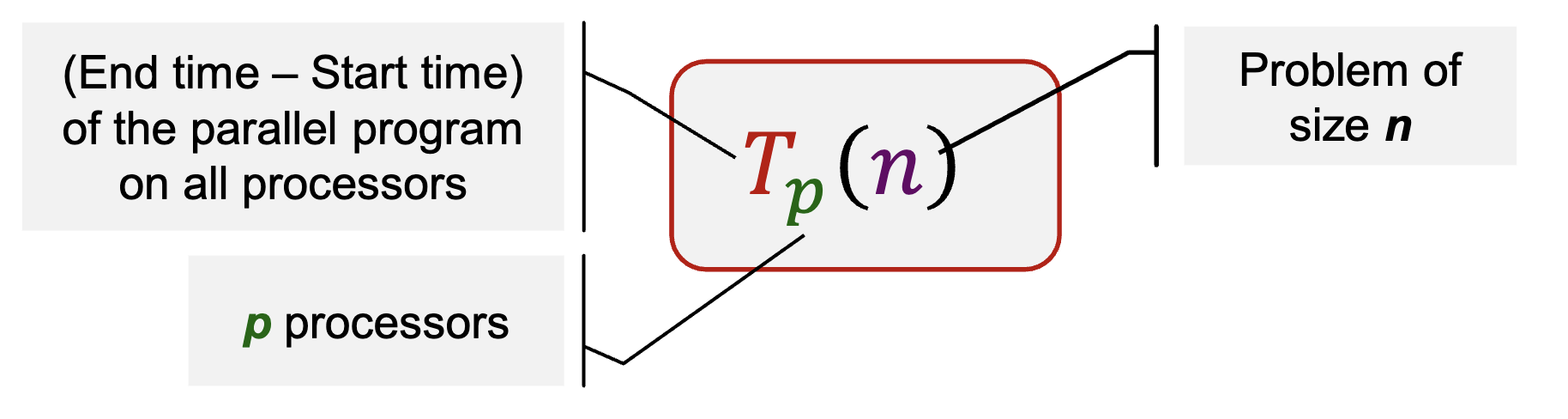
Parallel Execution Time
Consists of:
- Time for executing local computations
- Time for exchange of data between processors
- Time for synchronization between processors
- Waiting time
- Unequal load distribution of the processors
- Wait to access a shared data structure
Parallel Program: Cost
Cost of a parallel program with input size n executed on p processors:
measures the total amount of work performed by all processors, i.e. processor-runtime product
A parallel program is cost-optimal if it executes the same total number of operations as the fastest sequential program
Parallel Program: Speedup
- Measure the benefit of parallelism: a comparison between sequential and parallel execution time
- Theoretically, always holds
- In practice, (superlinear speedup) can occur, for e.g. when problem working task “fits” in the cache
Best Sequential Algorithm:
- Best sequential algorithm may not be known
- There exists an algorithm with the optimum asymptotic execution time, but other algorithms lead to lower execution times in practice
- Complex implementation for the fastest algorithm
Parallel Program: Efficiency
Actual degree of speedup performance achieved compared to the maximum
Ideal speedup:
Scalability
Interaction between the size of the problem and the size of the parallel computer
- Impact on load balancing, overhead, arithmetic intensity, locality of data access
- Application dependent
Fixed problem size and the machine
- Small problem size:
- Parallelism overheads dominate parallelism benefits
- Problem size may be appropriate for a small machine, but inappropriate for large one
- Large problem size: (problem size chosen to be appropriate for large machine)
- Key working set may not “fit” in small machine (causing thrashing to disk, or key working set exceeds cache capacity, or can’t run at all)
Scaling Constraints:
- Application-oriented scaling properties (specific to application)
- Particles per processor in a parallel N-body simulation
- Transactions per processor in a distributed database
- In practice, problem size is a combination of parameters, not only one number
- Resource-oriented scaling properties
- Problem constrained scaling (PC): use a parallel computer to solve the same problem faster
- Time constrained scaling (TC): completing more work in a fixed amount of time
- Memory constrained scaling (MC): run the largest problem possible without overflowing main memory
Amdahl’s Law
f (0 ≤ f ≤ 1) is called the sequential fraction Also known as fixed-workload performance

Sequential Execution Time
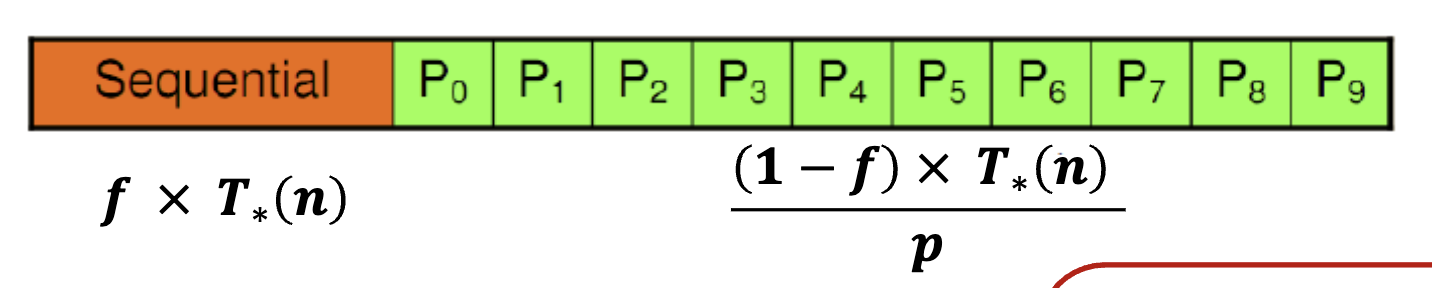
Parallel Execution Time
However, in many computing problems, f is not a constant
- Commonly dependent on problem size n
- f is a function of n, f(n)
An effective parallel algorithm is:
Thus, speedup:
→ Amdahl’s Law can be circumvented for large problem size!
Gustafson’s Law (1988)
There are certain applications where the main constraint is execution time
- e.g. weather forecasting, chess program, etc
- Higher computing power is used to improve accuracy / better result
If f is not a constant but decreases when problem size increases, then
→ constant execution time for sequential part
→ execution time of the parallelizable part for a problem of size n and p processors
Assume parallel program is perfectly parallelizable (without overheads), then
If T*(n) increases strongly monotonically with n, then
Communication Time
Message Transmission: Sender
Sending processor
To send a message
- Message is copied into a system buffer
- A checksum is computed
- A header is added to the message
- A timer is started and the message is sent out
After sending the message
- If acknowledgment message arrives, release the system buffer
- If the timer has elapsed, the message is re-sent
- Restart timer, possibly with a longer time
Message Transmission: Receiver
Receiving processor
Message is copied from the network interface into a system buffer
Compare computed checksum and received checksum
- Mismatch: discard the message; re-sent after the sender timer has elapsed
- Identical: message is copied from the system buffer into the user buffer; application program gets a notification and can continue execution
Performance Measures
| Measure | Definition | Unit |
|---|---|---|
| Bandwidth | Maximum rate at which data can be sent | bits (bytes) per second |
| Byte transfer time | Time to transmit a single byte | Seconds/byte |
| Time of flight | Time the first bit arrived at the receiver (channel propagation delay) | second |
| Transmission time | Time to transmit a message | second |
| Transport latency | Total time to transfer a message = transmission time + time of flight | second |
| Sender overhead | Time of computing the checksum, appending the header, and executing the routing algorithm | second |
| Receiver overhead | Time of checksum comparison and generation of an acknowledgment | second |
| Throughput | Effective bandwidth | bits (bytes) per second |
Total Latency of a Message of Size m:
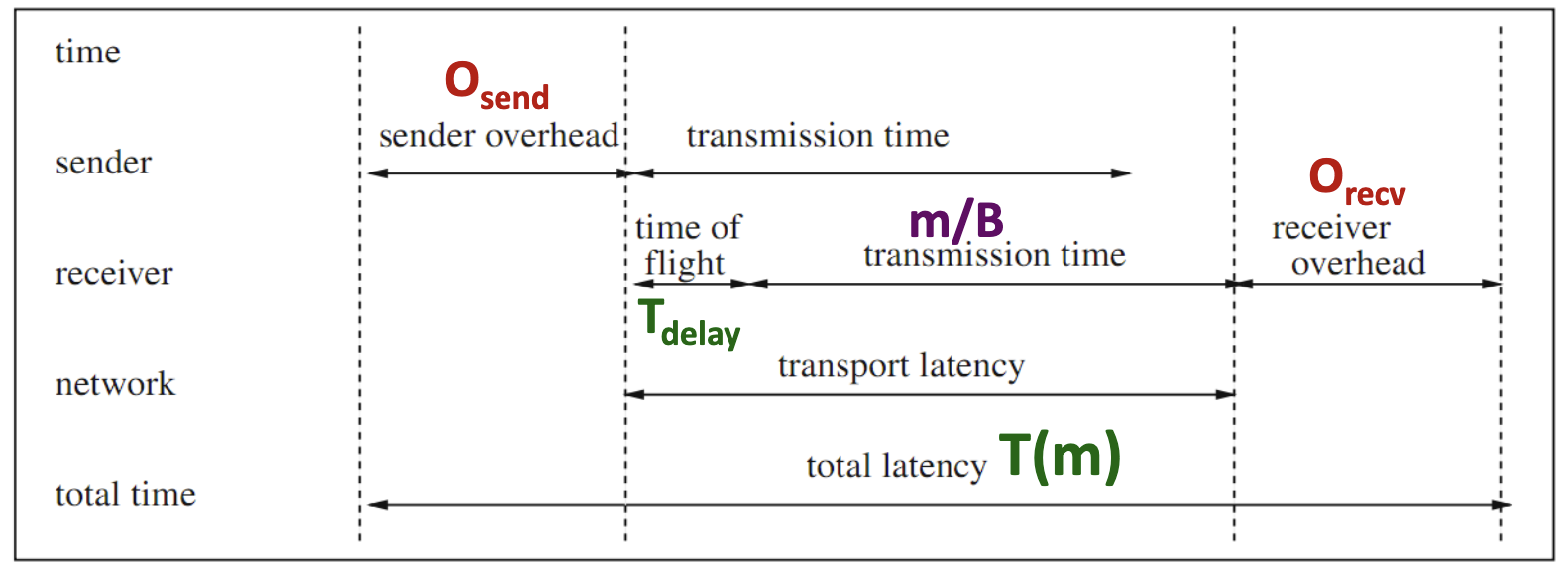
- → network bandwidth
- → time first bit to arrive at receiver
- no checksum error and network contention and congestion,
- → is independent of the message size
- → the byte transfer time
Performance Analysis
Experimentation Challenges
Experiment with writing and tuning your own parallel programs
- Many times, we obtain misleading results or tune code for a workload that is not representative of real-world use cases
Start by setting your application performance goals
- Response time, throughput, speedup?
- Determine if your evaluation approach is consistent with these goals
Try the simplest parallel solution first and measure performance to see where you stand
Performance analysis strategy:
- Determine what limits performance:
- Computation
- Memory bandwidth (or memory latency)
- Synchronization
- Establish the bottleneck
Possible bottlenecks
Instruction-rate limited: add “math” (non-memory instructions)
- Does execution time increase linearly with operation count as math is added?
Memory bottleneck: remove almost all math, but load same data
- How much does execution-time decrease?
Locality of data access: change all array accesses to A[0]
- How much faster does your code get?
Synchronization overhead: remove all atomic operations or locks
- How much faster does your code get? (provided it still does approximately the same amount of work)