L6: GPGPU Programming
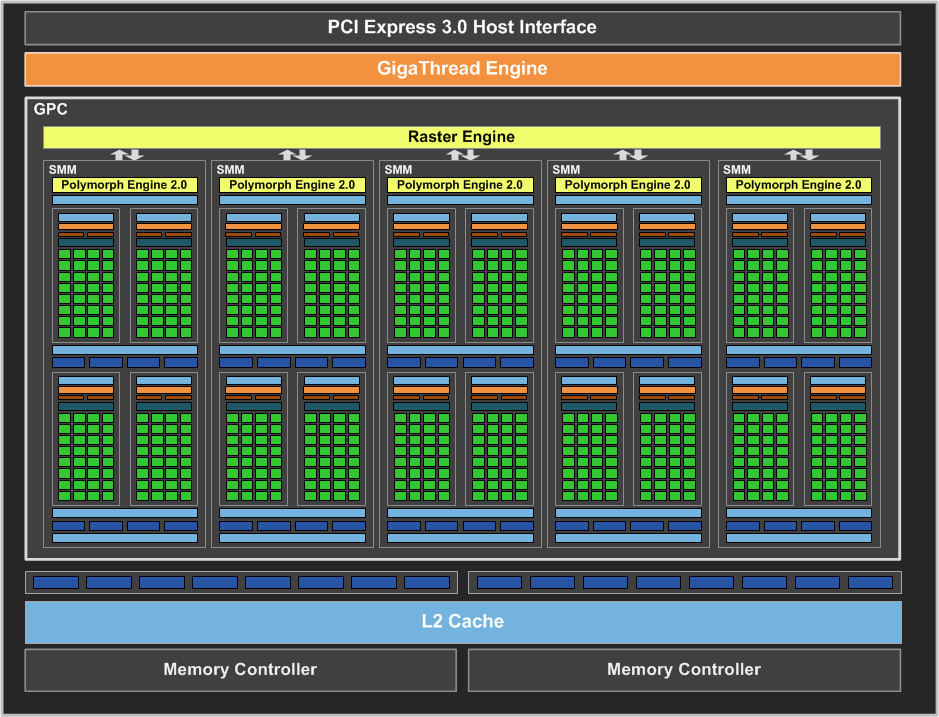
GPU Architecture
Multiple Streaming Processors (SMs), which have
- Memory and Cache
- Connecting interface (usually PCI Express) with the host (CPU)
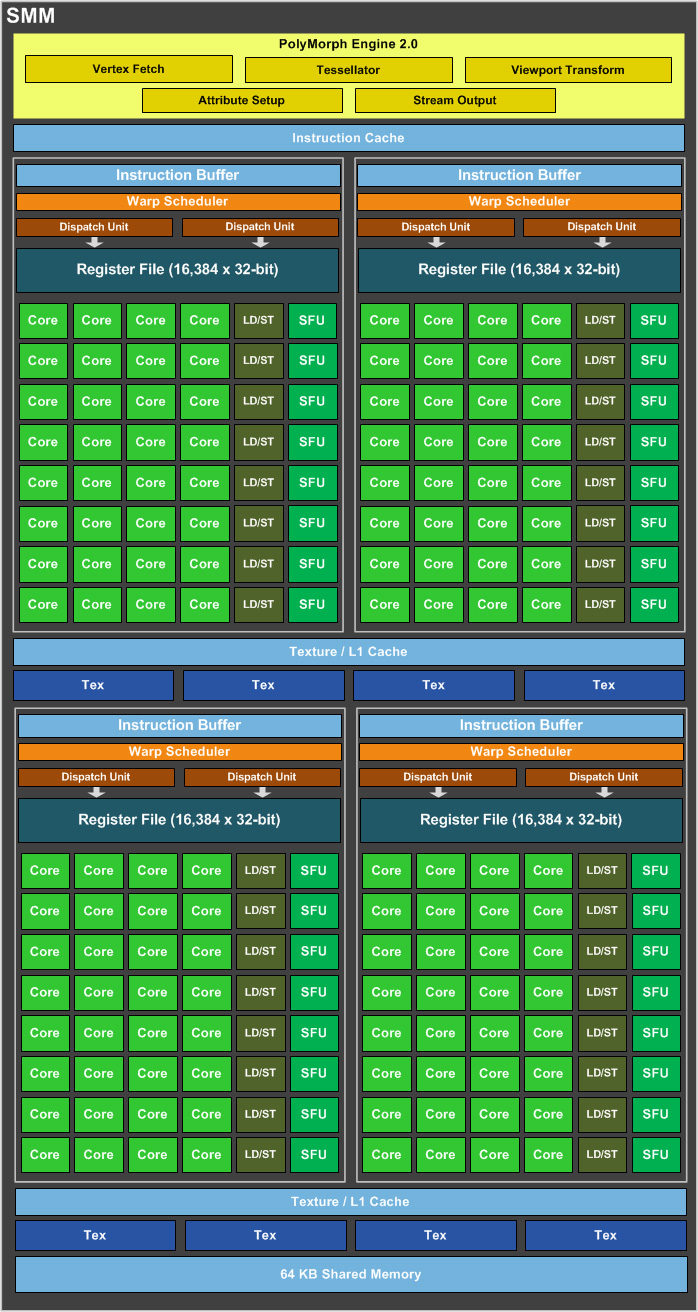
SM consists of multiple compute cores, which have
- Memory (registers, L1 cache, shared memory)
- Logic for threads and instruction management
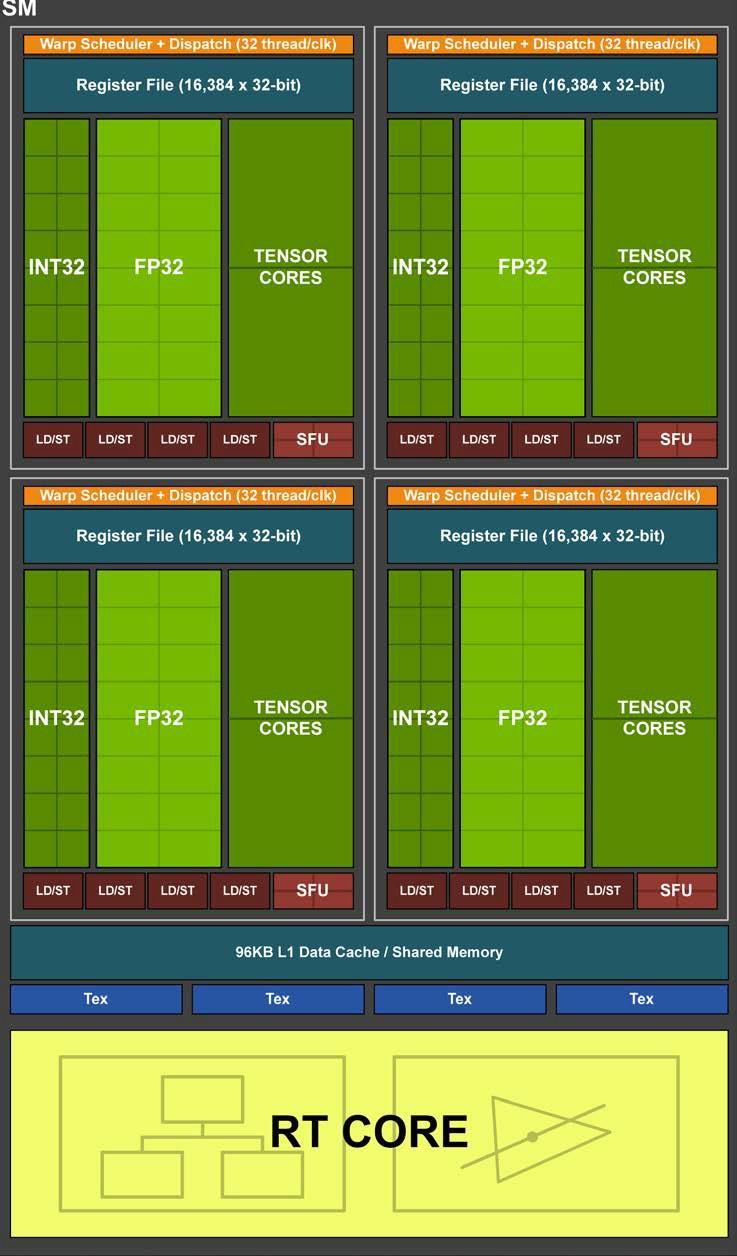
Turing SM Architecture
Compute Capability
Tesla (1.x), Fermi (2.x), Kepler (3.x), Maxwell (5.x), Pascal (6.x), Volta (7.0, 7.2), Turing (7.5), Ampere (8.0, 8.6)
On the SoC Compute Cluster:
- xgpd[0-9] – 2xTitan V (CC 7.0)
- xgpe[0-11] – Titan RTX(CC 7.5)
- xgpf[0-10] – Tesla T4 (CC 7.5)
- xgpg[0-9], xgph[0-19] – Tesla A100 (CC 8.0)
CUDA Programming Model
“Compute Unified Device Architecture”
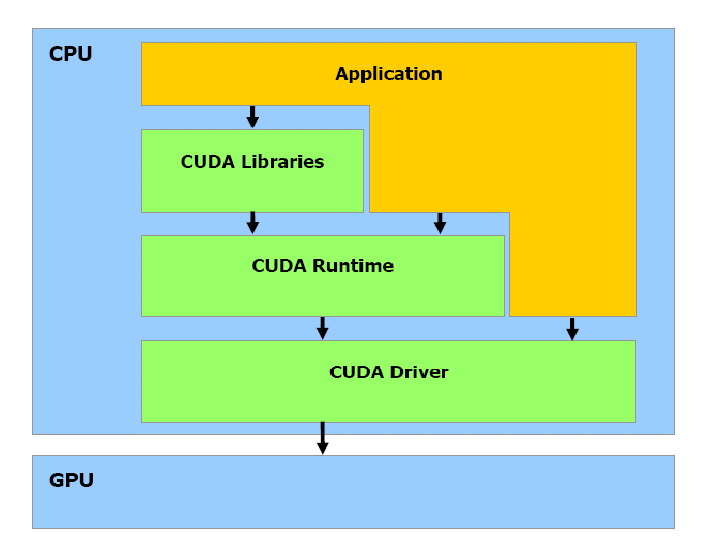
CUDA programming model
CUDA C Runtime:
- Minimal set of extensions to the C language
- Kernels defined as C functions embedded in application source code
- Requires a runtime API (built on top of CUDA driver API)
CUDA driver API:
- Low-level C API to load compiled kernels, inspect their parameters, and to launch them
- Kernels are written in C and compiled to CUDA binary or assembly code
- Requires more code, harder to program and debug
- Much like using the OpenGL API on GLSL shaders
Compilation and Linking:
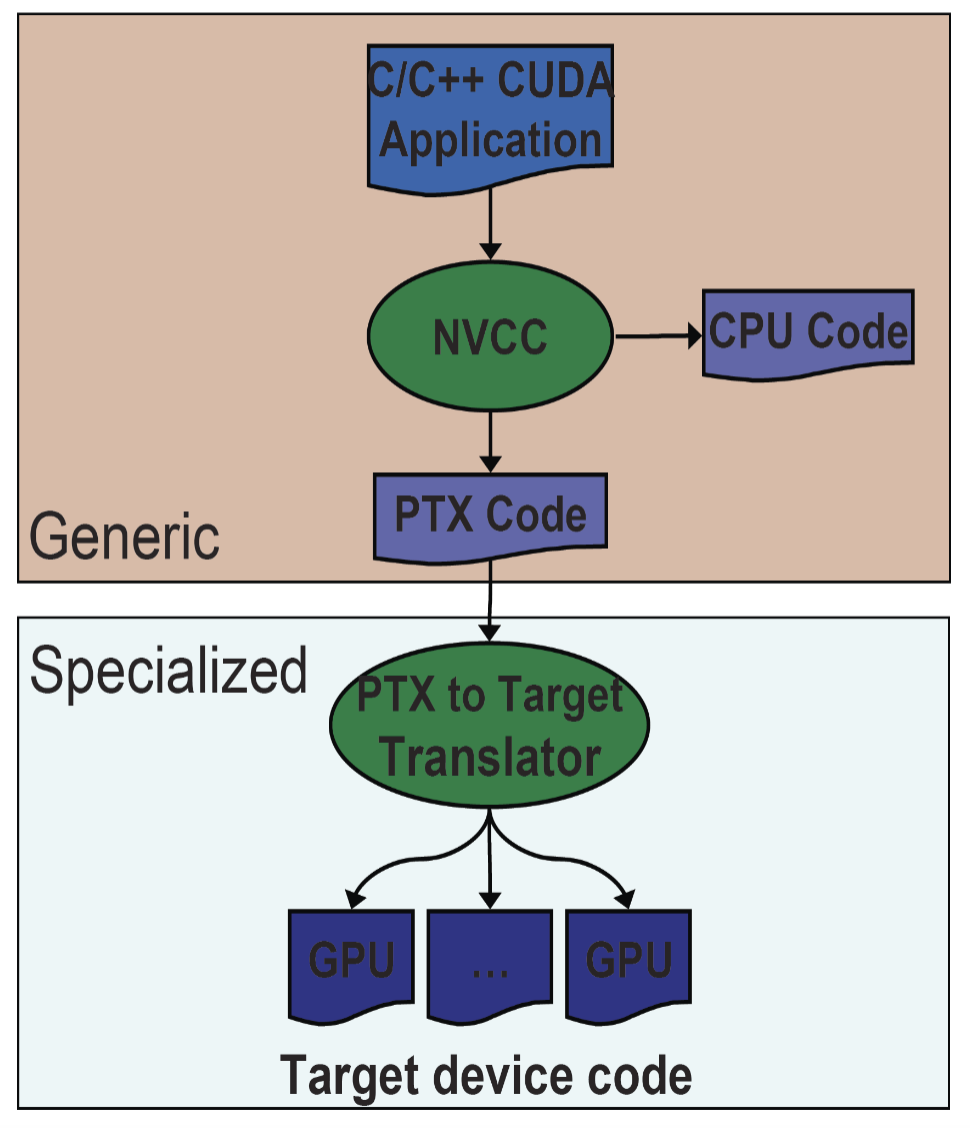
Compilation and linking
- Compiler: NVCC
- NVCC outputs
- C code (host CPU code) → Must then be using another tool
- PTX → Object code or PTX source interpreted at runtime
- Linking with two static/dynamic libraries
- CUDA runtime library (cudart)
- CUDA core library (cuda)
CUDA Kernels and Threads:
Device = GPU, Host = CPU, Kernel = function that runs on the device
Parallel portions execute on device as kernels
- One or multiple kernels are executed at a time
- Multiple kernels are allowed in newer CUDA hardware
CUDA threads are extremely lightweight
- Very little creation overhead
- Instant switching
CUDA uses thousands of threads to achieve efficiency
Array of 32 parallel threads (a warp) executing in lockstep all at once (SPMD):
Thread blocks:
- In a block: shared memory, atomic operation, barrier synchronization
- Threads in different block cannot cooperate
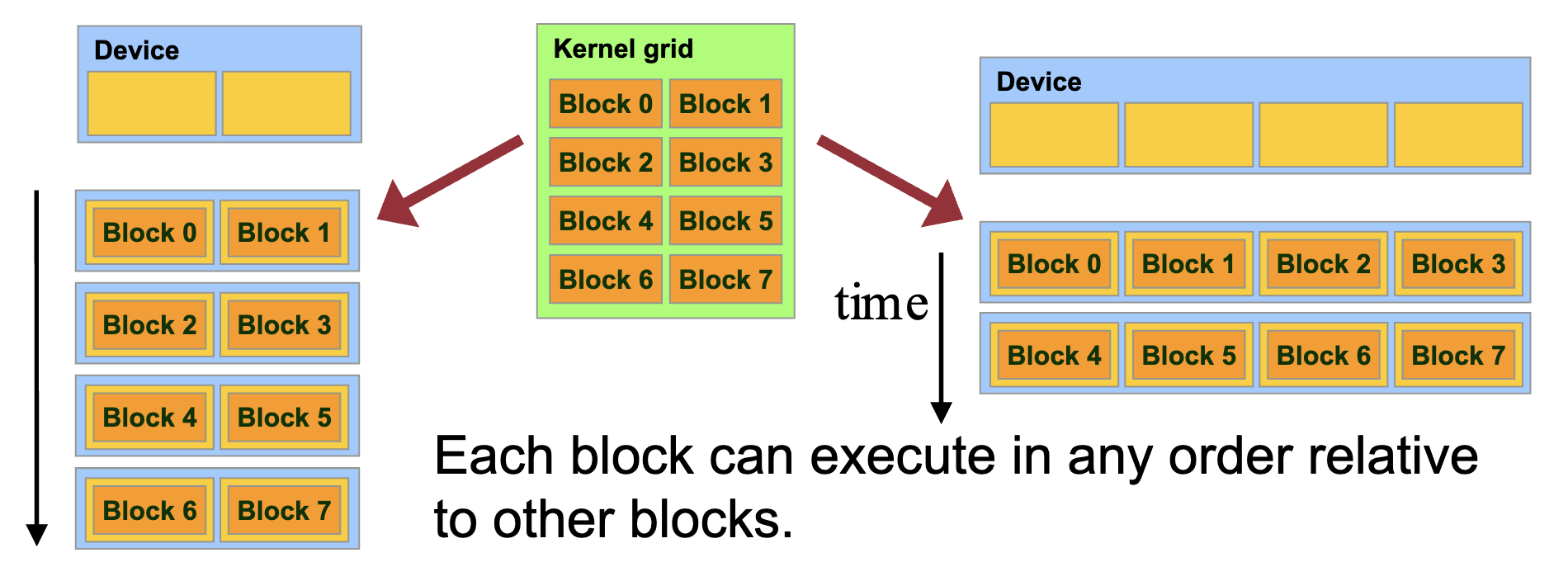
- Hardware is free to schedule thread blocks to any processor at any time
- A kernel scales across any number of parallel multiprocessors
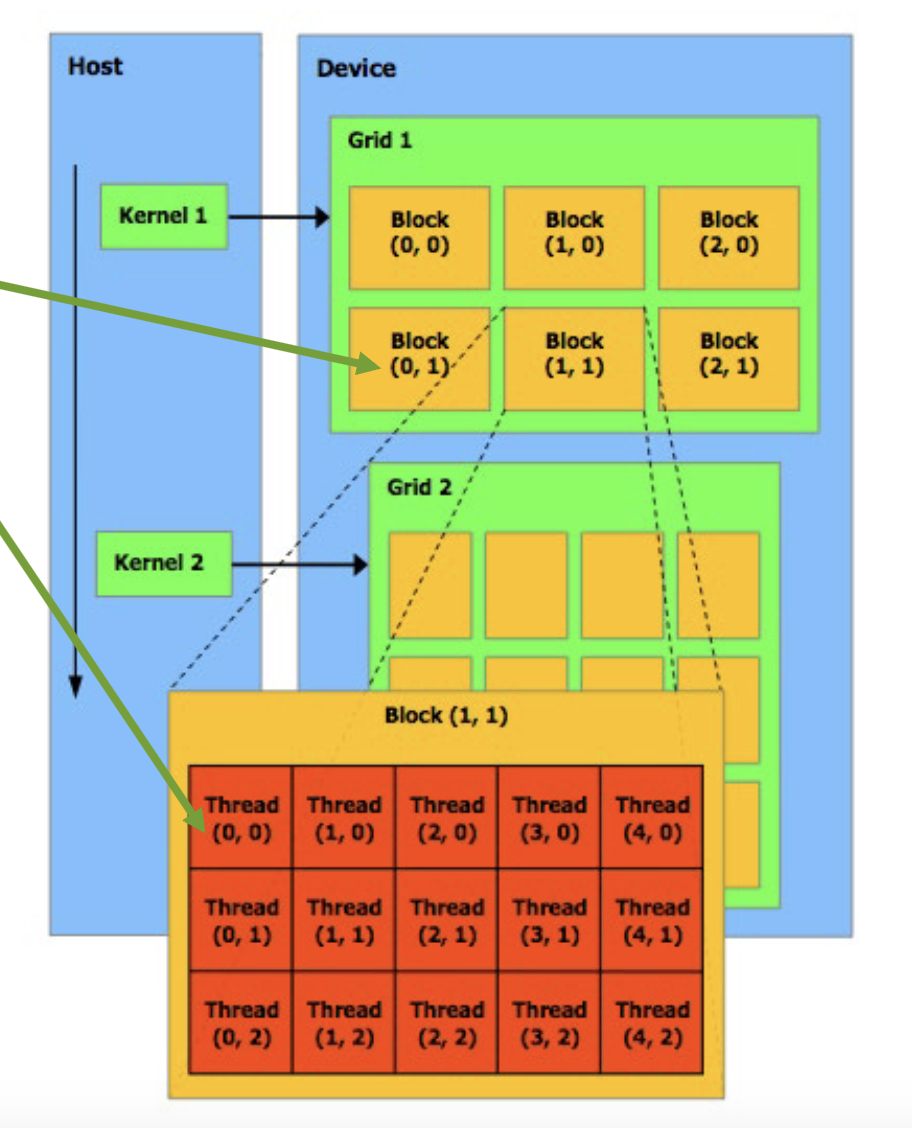
CUDA thread hierarchy
CUDA Thread Hierarchy:
- A kernel is executed by a grid of thread blocks. Blocks:
- Share data through shared memory
- Synchronize their execution
- Threads from different blocks cannot cooperate
Block IDs and Thread IDs
- Each thread uses IDs to decide what data to work on
- Block ID: 1D, 2D, or 3D
- Thread ID: 1D, 2D, or 3D
Execution Model Mapping to Architecture:
Kernels are launched in grids: 1 or multiple kernels execute at a time
A block executes on one SM: Does not migrate, GPUs usually have multiple SMs
Several blocks can reside concurrently on one SM
- Control limitations (depending on capability)
- Number is further limited by SM resources
- Register file is partitioned among all resident threads
- Shared memory is partitioned among all resident thread blocks
SIMT (single-instruction, multiple-thread) execution model
Multiprocessor creates, manages, schedules and execute threads in SIMT warps (group of 32 parallel threads)
Threads in a warp start together at the same program address. Threads have individual instruction program counter and register state
A block is always split into warps the same way. Each warp contains threads of consecutive, increasing thread IDs. Warp executes one common instruction at a time
CUDA Memory Model:
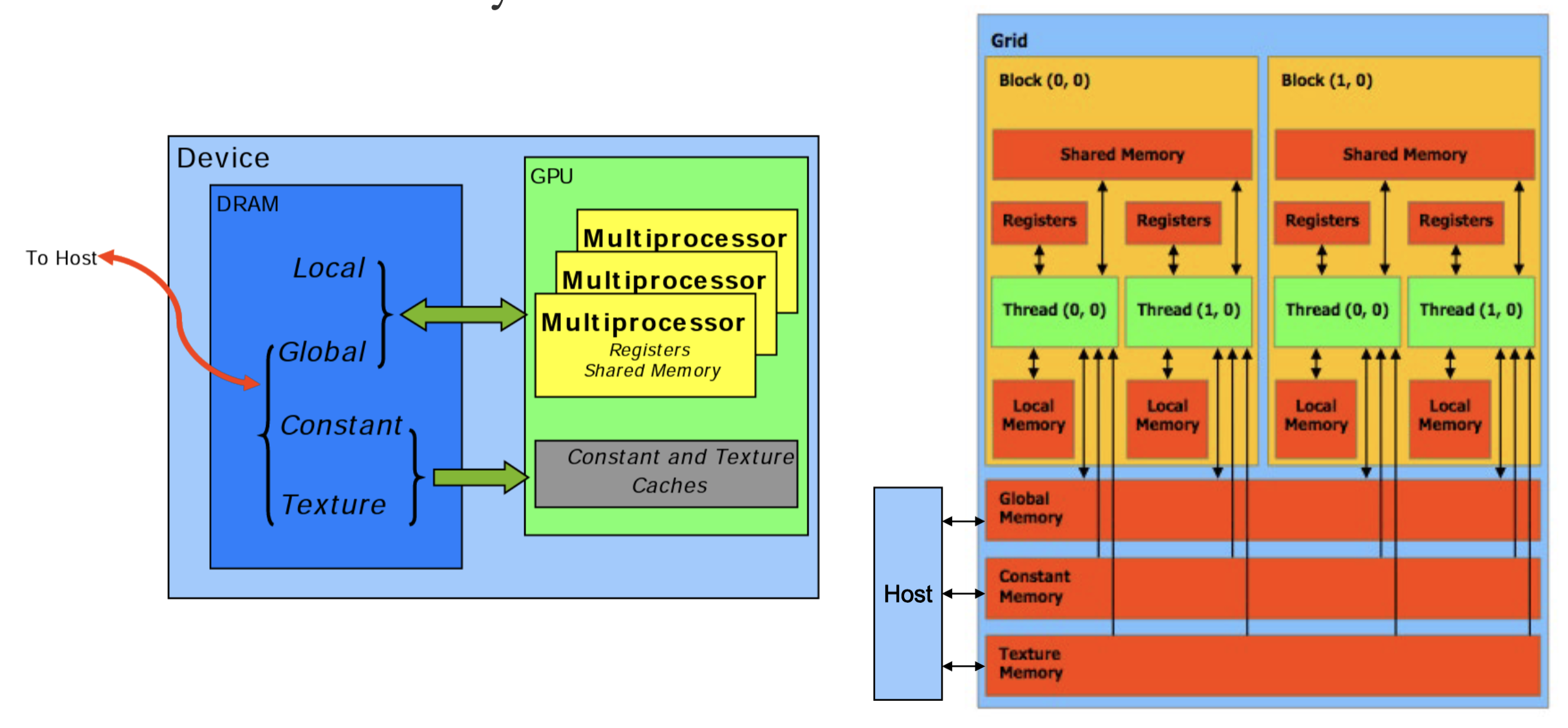
- Data must be explicitly transferred from CPU to device
- Global Memory and Shared Memory →Most important, commonly used
- Global memory is cached
- Shared memory is not cached, it’s the cache itself
- L1-cache is partitioned in shared memory
- Local, Constant, and Texture Memory for convenience / performance
- Local: automatic array variables allocated there by compiler → Cached
- Constant: useful for uniformly-accessed read-only data → Cached
- Texture: useful for spatially coherent random-access read-only data → Cached
- Provides filtering, address clamping and wrapping
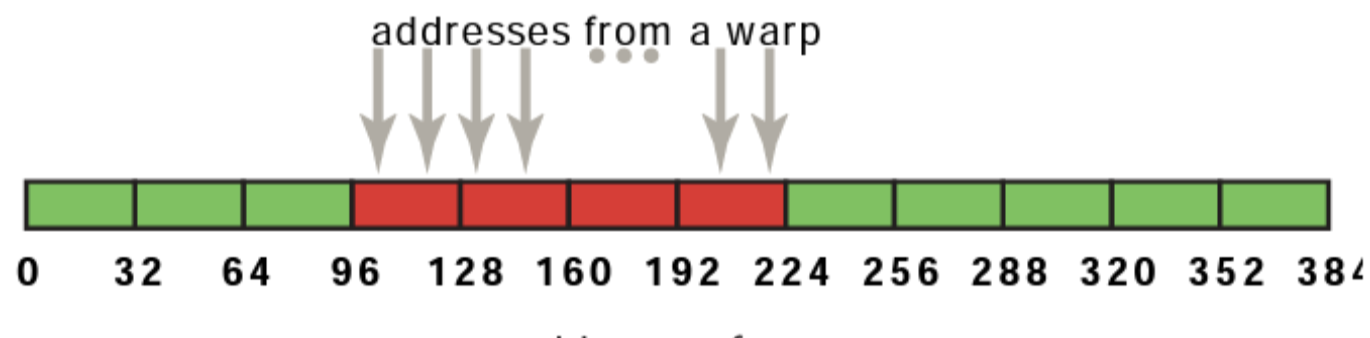
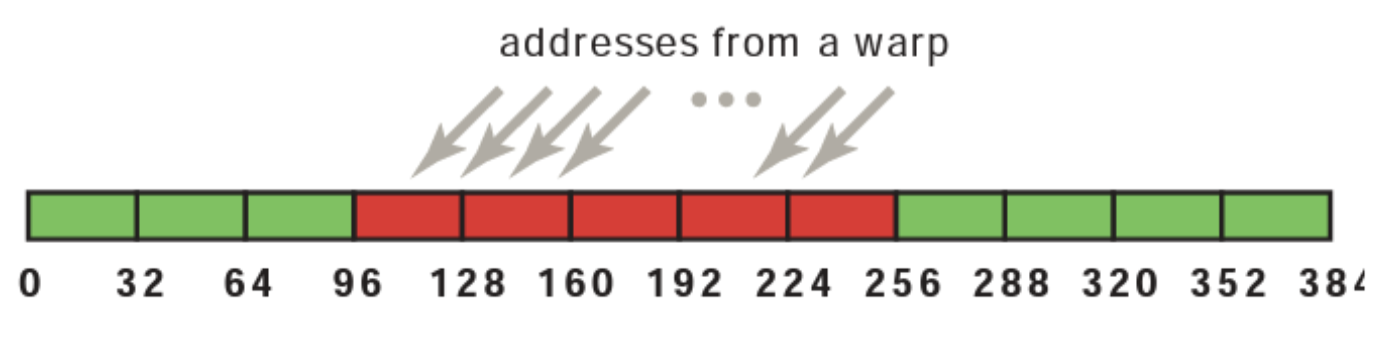
Coalesced Access to Global Memory:
- Simultaneous accesses to global memory by threads in a warp are coalesced into a number of transactions equal to the number of 32-byte transactions necessary to service all of the threads of the warp (compute capability 6.0 and above)
- The k-th thread accesses the k-th word in a 32-byte aligned array. Not all threads need to participate
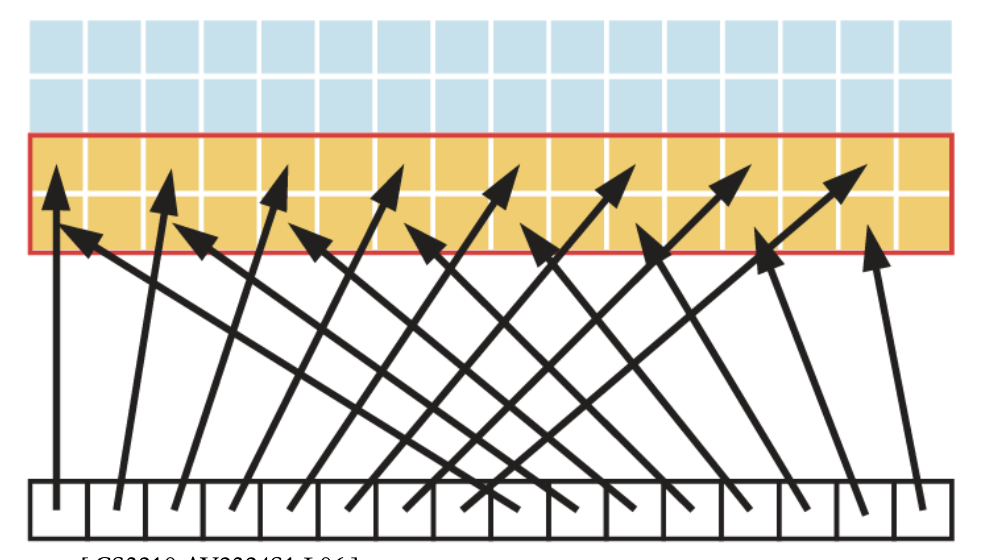
Shared Memory:
Higher bandwidth and lower latency than local or global memory
Divided into equally-sized memory modules, called banks. Addresses from different banks can be accessed simultaneously
Bank conflict: two addresses of a memory request fall in the same memory bank
- Memory access has to be serialized
- Each bank has a bandwidth of 32 bits every clock cycle, and successive 32-bit words are assigned to successive banks
- The warp size is 32 threads and the number of banks is also 32
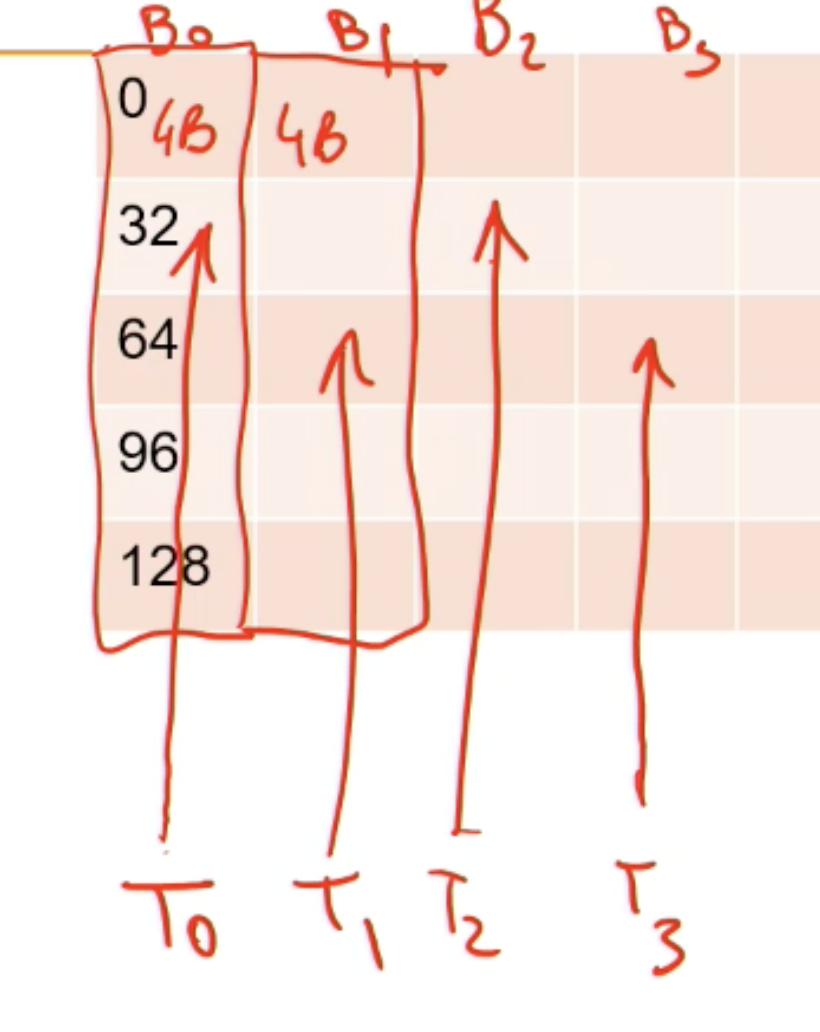
No bank conflict → access in parallel
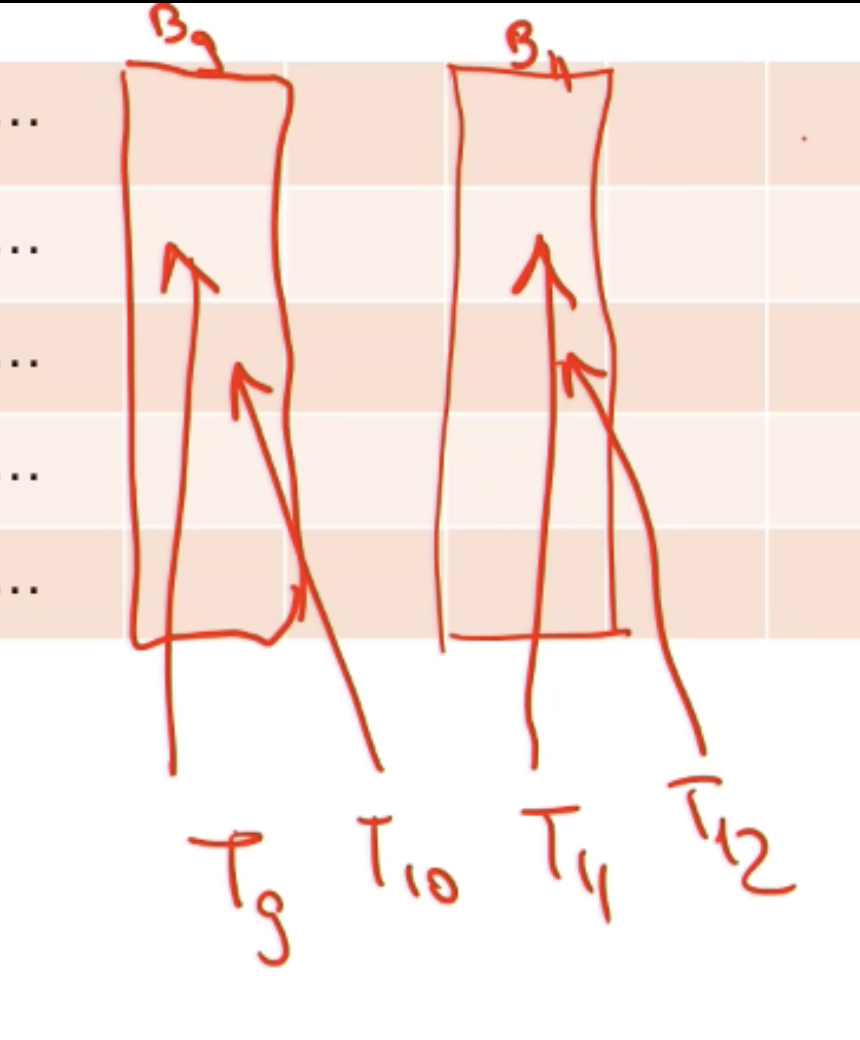
No conflict (broadcasted)
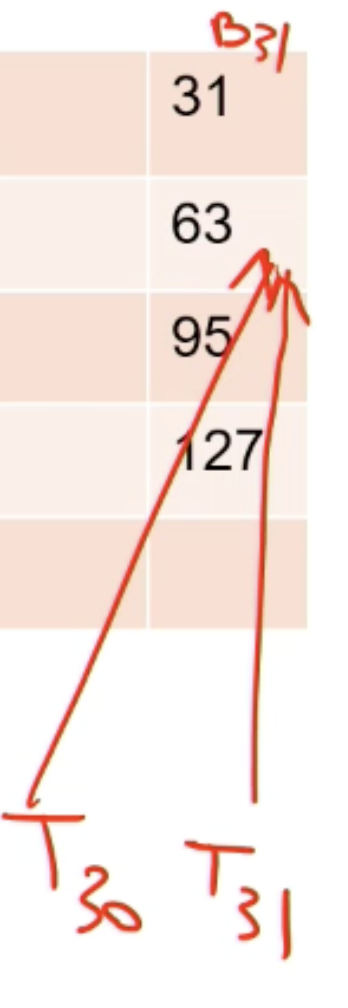
Strided Access:
- Threads within a warp access words in memory with a stride of 2
- A stride of 2 results in a 50% of load/store efficiency
- half the elements in the transaction are not used and represent wasted bandwidth
Programming in CUDA
Device Code: C functions with some restrictions
- Can only access GPU memory
- No variable number of arguments (“varargs”)
- No static variable
- No recursion (*)
Function Type: Function qualifiers
__host____device____global__- Function is a kernel
- Must have void return type
- A call to function must specify execution configuration
- Function parameters are passed via shared memory (*)
__host__and__device__can be used together
Launching Kernels:
- Modified C function call syntax
1kernel<<<dim3 grid, dim3 block, int smem, int stream>>>(...)- Execution Configuration (
<<< >>>)- grid dimensions: x and y
- thread-block dimensions: x, y, and z
- shared memory: number of bytes per block for extern smem variables declared without size → optional, 0 by default
- stream ID → optional, 0 by default
CUDA Built-In Device Variables: All __global__ and __device__ functions have access to these automatically defined variables
dim3 gridDim: Dimensions of the grid in blocks (gridDim.z unused)dim3 blockDim: Dimensions of the block in threadsdim3 blockIdx: Block index within the griddim3 threadIdx: Thread index within the block
Variable Qualifiers (Device code):
__device__- Stored in global memory (large, high latency, no cache)
- Read/write by all threads within grid
- Written by CPU via
cudaMemcpyToSymbol() - Lifetime: application
__constant__- Same as device, but cached and read-only by all threads within grid
- Written by CPU via
cudaMemcpyToSymbol() - Lifetime: application
__shared__- Stored in on-chip shared memory (very low latency)
- Read/write by all threads in the same thread block
- Lifetime: block
- Unqualified variables (in device code)
- Scalars and built-in vector types are stored in registers
- Arrays of more than 4 elements or run-time indices stored in local memory
- Read/write by thread only
- Lifetime: thread
GPU Memory Allocation / Release / Copy
GPU memory allocation / release:
cudaMalloc(void **pointer, size_t nbytes);cudaMemset(void *pointer, int value, size_t count);cudaFree(void* pointer);
Data copy:
cudaMemcpy(void *dst, void *src, size_t nbytes, enum cudaMemcpyKind direction);enum cudaMemcpyKindcan becudaMemcpyHostToDevice,cudaMemcpyDeviceToHost,cudaMemcpyDeviceToDevice
- Unified memory model does not need data transfer:
__managed__- Page-locked host memory
Thread Synchronization Function
void __syncthreads();
- Synchronizes all threads in a block
- Generates barrier synchronization instruction
- Used to avoid RAW / WAR / WAW hazards when accessing shared memory
CUDA Examples
Add 2 arrays
1// Device code2__global__ void VecAdd( float *A, float *B, float *C )3{4 int i = blockIdx.x * blockDim.x + threadIdx.x;5 if ( i < N ) C[i] = A[i] + B[i];6}7
8// Host code9int main()10{11 // Allocate vectors in device memory12 size_t size = N * sizeof(float);13 float *d_A;14 cudaMalloc( (void**)&d_A, size );15 float *d_B;16 cudaMalloc( (void**)&d_B, size );17 float *d_C;18 cudaMalloc( (void**)&d_C, size );19
20 // Copy vectors from host memory to device memory21 // h_A and h_B are input vectors stored in host memory22 cudaMemcpy( d_A, h_A, size, cudaMemcpyHostToDevice );23 cudaMemcpy( d_B, h_B, size, cudaMemcpyHostToDevice );24
25 // Invoke kernel26 int threadsPerBlock = 256;27 int blocksPerGrid = (N + threadsPerBlock – 1) /28 threadsPerBlock;29 VecAdd<<<blocksPerGrid, threadsPerBlock>>>(d_A, d_B, d_C);30
31 // Copy result from device memory to host memory32 // h_C contains the result in host memory33 cudaMemcpy( h_C, d_C, size, cudaMemcpyDeviceToHost );34
35 // Free device memory36 cudaFree(d_A); cudaFree(d_B); cudaFree(d_C);37}Matrix Multiplication
Matrix multiplication in global memory:
1// Matrices are stored in row-major order:2// M(row, col) = *(M.elements + row * M.width + col)3typedef struct {4 int width;5 int height;6 float* elements;7} Matrix;8
9// Thread block size10#define BLOCK_SIZE 1611
12// Forward declaration of the matrix multiplication kernel13__global__ void MatMulKernel(const Matrix, const Matrix, Matrix);14
15// Matrix multiplication - Host code16// Matrix dimensions are assumed to be multiples of BLOCK_SIZE17void MatMul(const Matrix A, const Matrix B, Matrix C)18{19 // Load A and B to device memory20 Matrix d_A;21 d_A.width = A.width; d_A.height = A.height;22 size_t size = A.width * A.height * sizeof(float);23 cudaMalloc((void**)&d_A.elements, size);24 cudaMemcpy(d_A.elements, A.elements, size, cudaMemcpyHostToDevice);25 Matrix d_B;26 d_B.width = B.width; d_B.height = B.height;27 size = B.width * B.height * sizeof(float);28 cudaMalloc((void**)&d_B.elements, size);29 cudaMemcpy(d_B.elements, B.elements, size, cudaMemcpyHostToDevice);30
31 // Allocate C in device memory32 Matrix d_C;33 d_C.width = C.width; d_C.height = C.height;34 size = C.width * C.height * sizeof(float);35 cudaMalloc((void**)&d_C.elements, size);36
37 // Invoke kernel38 dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);39 dim3 dimGrid(B.width / dimBlock.x, A.height / dimBlock.y);40 MatMulKernel<<<dimGrid, dimBlock>>>(d_A, d_B, d_C);41
42 // Read C from device memory43 cudaMemcpy(C.elements, d_C.elements, size, cudaMemcpyDeviceToHost);44 // Free device memory45 cudaFree(d_A.elements); cudaFree(d_B.elements); cudaFree(d_C.elements);46}47
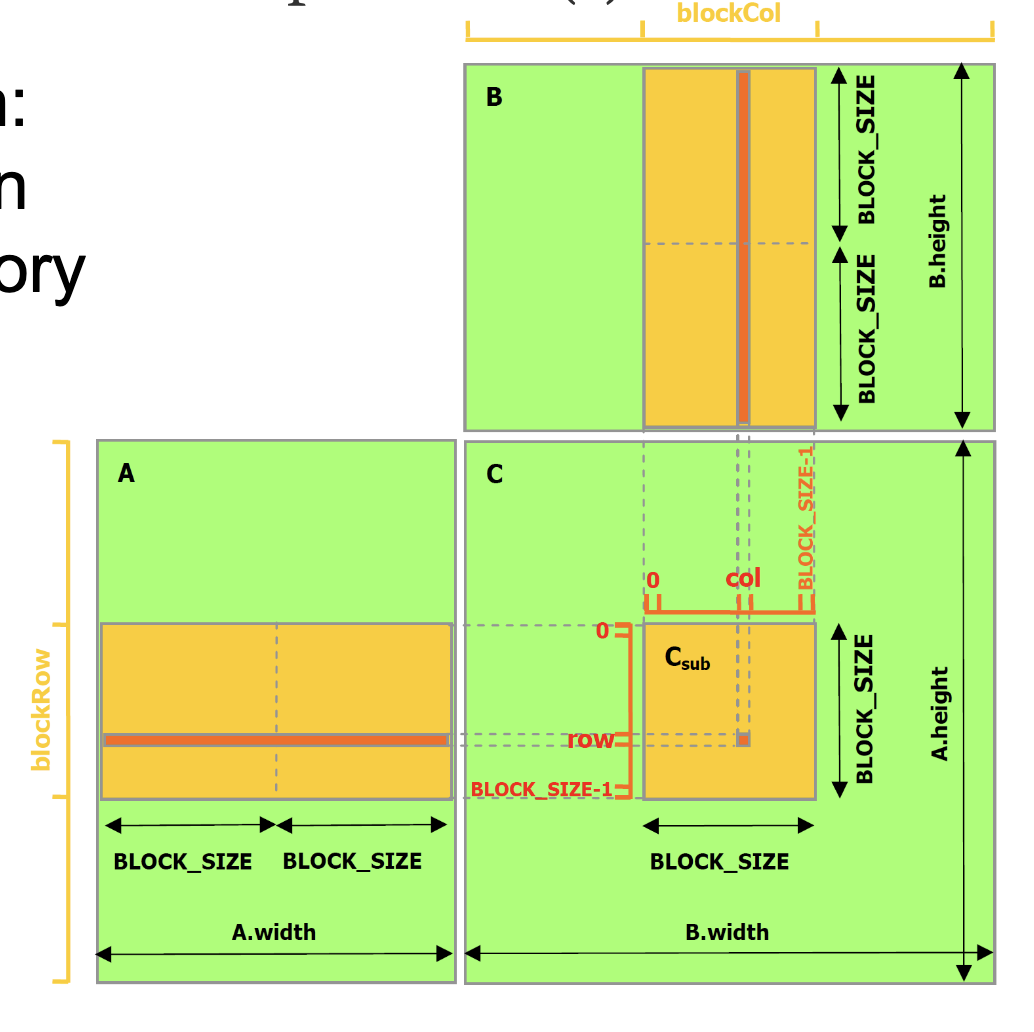
48// Matrix multiplication kernel called by MatMul()49__global__ void MatMulKernel(Matrix A, Matrix B, Matrix C)50{51 // Each thread computes one element of C52 // by accumulating results into Cvalue53 float Cvalue = 0;54 int row = blockIdx.y * blockDim.y + threadIdx.y;55 int col = blockIdx.x * blockDim.x + threadIdx.x;56 for (int e = 0; e < A.width; ++e)57 Cvalue += A.elements[row * A.width + e]58 * B.elements[e * B.width + col];59 C.elements[row * C.width + col] = Cvalue;60}Block multiplication: matrix multiplication using shared memory
Optimizing CUDA Programs
Optimization Strategies
- Optimizing memory usage to achieve maximum memory bandwidth
- Different memory spaces and access patterns have vastly different performance
- Maximizing parallel execution
- Restructure algorithm to expose as much data parallelism as possible
- Map to hardware to increase occupancy (hardware utilization)
- Optimizing instruction usage to achieve maximum instruction throughput
- Use high throughput arithmetic instructions
- Avoid different execution paths within same warp
Memory Optimizations
- Minimize data transfer between host and device
- Ensure global memory accesses are coalesced whenever possible
- Minimize global memory accesses by using shared memory
- Minimize bank conflicts in shared memory accesses
Data Transfer between Host and Device:
- Peak bandwidth between device memory and GPU is much higher than that between host memory and device memory
- Should minimize data transfer between host and device memory
- Even if that means running kernels on GPU that do not have any speed-up over CPU
- Batching many small transfers into one larger transfer performs significantly better than making each transfer separately
- Use page-locked (or pinned) memory transfer
- Pinned memory is not cached
- Use the zero-copy feature that allows the threads to directly access the host memory
Concurrent data transfers and executions: Overlapping asynchronous transfers with computation
cudaMemcpyAsync()instead ofcudaMemcpy()when possible- CPU computation while data transfers, followed by device code is executed
- Use different streams to achieve concurrent copy (transfer) and execute


Execution Configuration
Strike a balance between occupancy and resource utilization
- Improve occupancy:
- #warps should be larger than #multiprocessors → All multiprocessors have at least one warp to execute
- Low occupancy makes hiding memory latency impossible
- No idling when a block synchronizes
- Threads per block should be multiple of warp size, minimum of 64 threads
- Use the resources in the best way
- Avoid memory bank conflicts, facilitate coalescing
- Several smaller thread blocks rather than one large thread block per multiprocessor
- Multiple concurrent blocks can reside on a multiprocessor
- Block size limited by registers and shared memory used
- Per thread resources required by a CUDA kernel might limit the maximum block size in an unwanted way
- Ensure that at least one block can run on an SM
- When a thread block allocates more registers than are available on a multiprocessor, the kernel launch fails
- Avoid multiple contexts per GPU within the same CUDA application
- If multiple CUDA application processes access the same GPU concurrently, this almost always implies multiple contexts
Maximize Instruction Throughput
Minimize the use of arithmetic instructions with low throughput
- Trade precision for speed
- Single-precision floats provide the best performance
- Integer division and modulo operations are particularly costly → Replace with bitwise operations
- Use signed loop counters (C can apply more aggressive optimizations, even if there is undefined behavior at overflow)
- Functions operating on
charorshortwhose operands generally need to be converted to anint
Control Flow:
- Minimize divergent warps caused by control flow instructions
- If the control flow depends on the thread ID, the controlling condition should be written to minimize the number of divergent warps
- Reduce the number of instructions
- Optimizing out synchronization points