L9: Parallel Programming Model II
Data Distribution
- Parallel computing problems are commonly based on array of various dimensions
- Useful to study how to decompose the arrays for distribution on multiple processors
- known as data distribution / work distribution / decomposition / partitioning
- For problems exhibiting data parallelism, data distribution can be used as a simple parallelization strategy
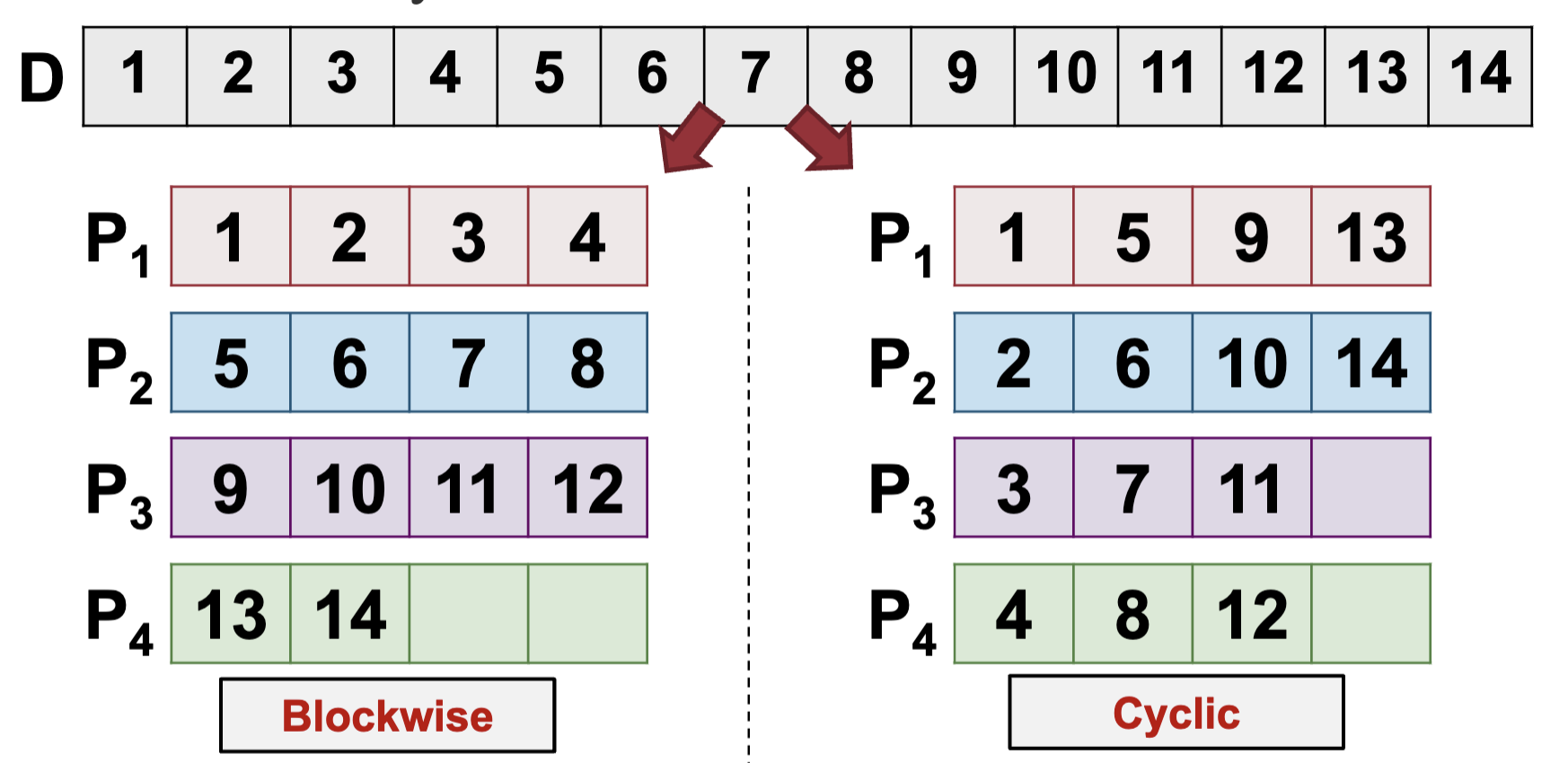
Data Distribution for 1D Arrays
- Assumptions for discussion:
- p identical processors, P1, P2, .., Pp, and with processor rank i in {1, 2, .., p}
- Array elements numbered from 1 to n
- Given a one dimensional array, common distribution patterns:
- Blockwise data distribution
- Cyclic data distribution
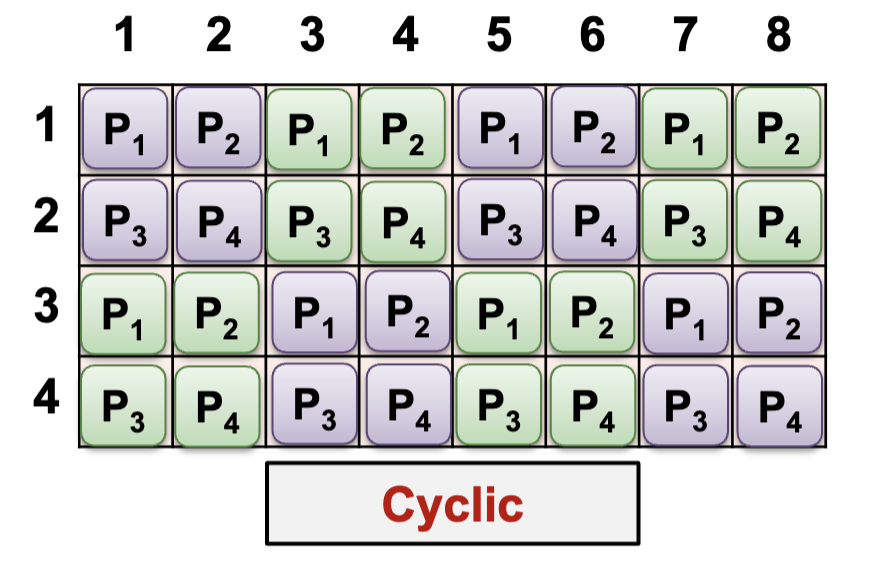
Data distribution for 2D Arrays
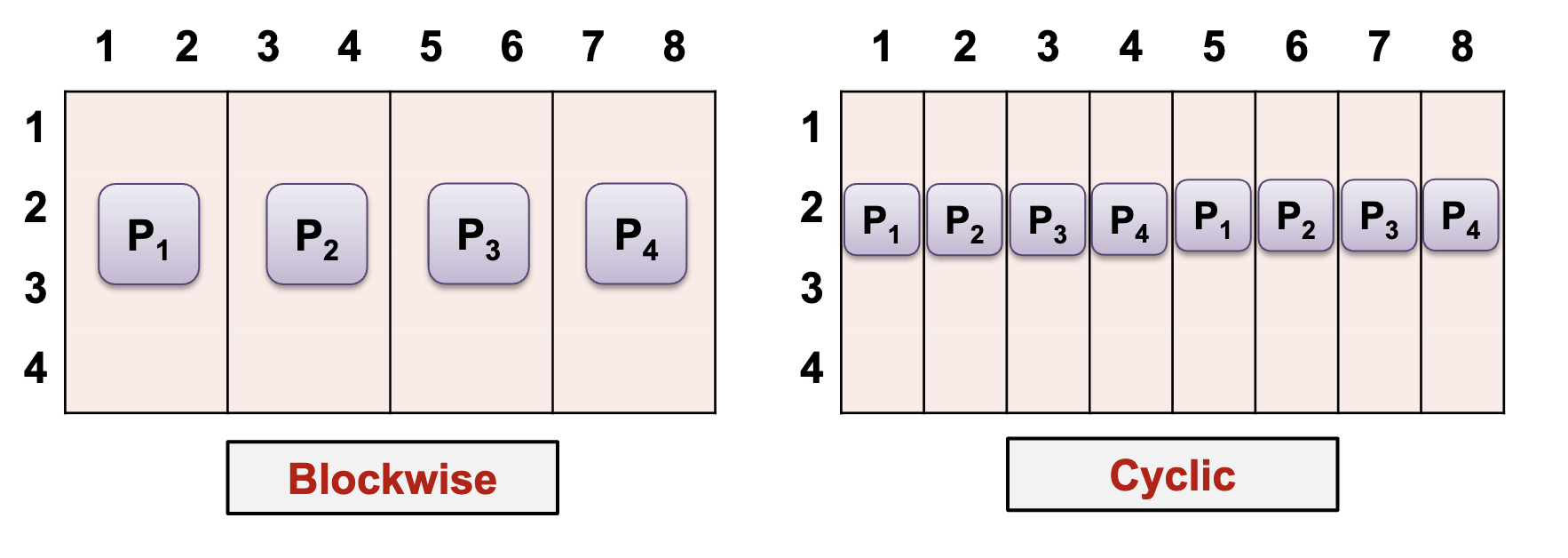
1D distributions (column dimension)
- Combination of blockwise / cyclic distribution in one or both dimensions can be used
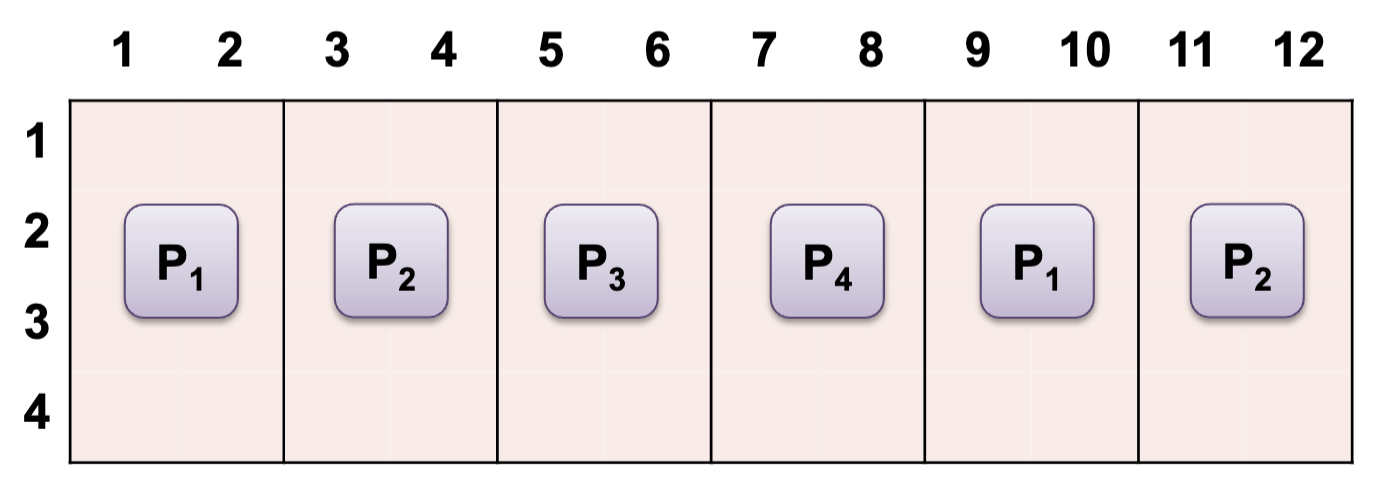
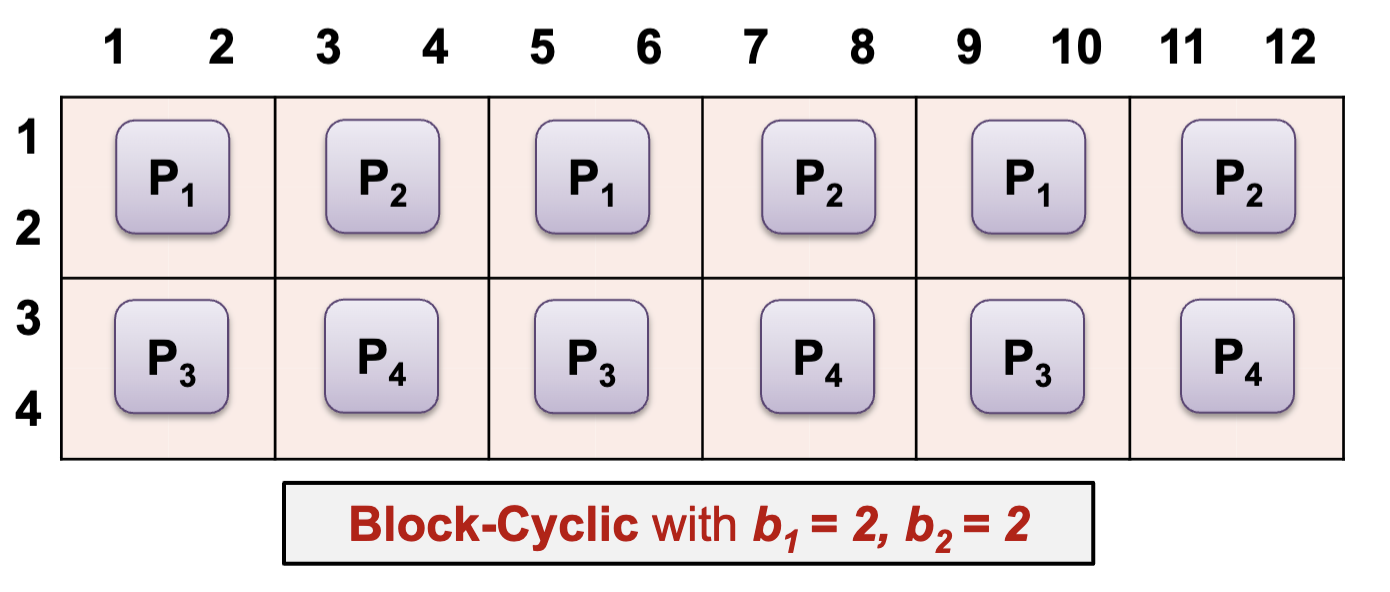
Block-Cyclic with b = 2
1-dimension distributions:
- Block-Cyclic is a new distribution pattern
- Form blocks of size b, then perform cyclic (round robin) allocation
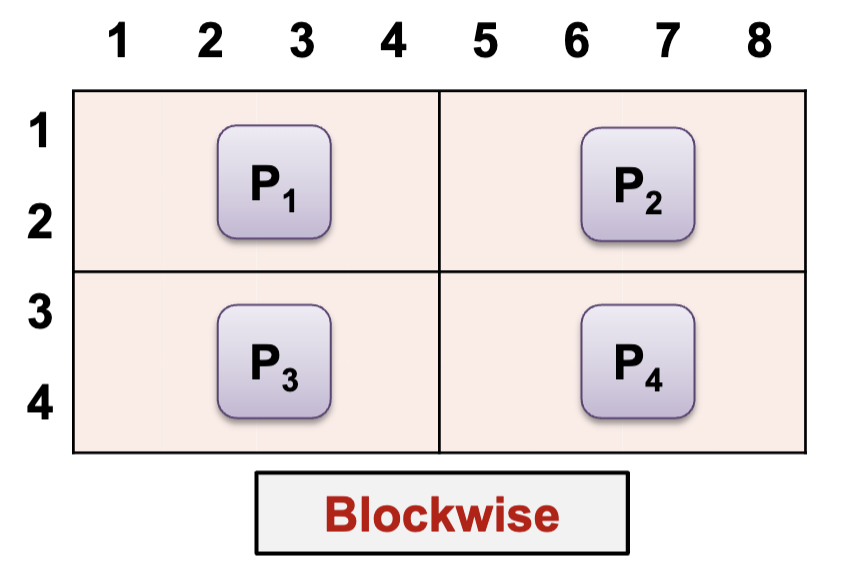
2-dimension distributions:
- Processors are virtually organized into 2D mesh of R x C, i.e. each Processor now has a row and column number
- Checkerboard distribution can then be applied:
- Blockwise: elements split into blocks along both dimensions depending on R and C
- Cyclic: cyclic assignment of elements according to processor mesh
- Block-Cyclic: elements spilt into b1 x b2 size blocks, then cyclical assignment to processors
Example: Matrix Multiplication (size N), p processors
-
- A is distributed with block-cyclic (row dimension) of size b or with cyclic
- B is distributed to all processors in full
- C: same as A
-
- A: each row is assigned to N processor
- B: each column is assigned to N processor
- C: each cell is assigned to 1 processor
Information Exchange
Purpose: Information exchange between the executing processors is necessary for controlling the coordination of different parts of a parallel program execution
Shared address space: use Shared variables
Distributed address space: use Communication operations
Shared Variable
- Shared memory programming models assume a global memory accessible by all processors
- Information exchange through shared variables
- Need synchronization operations for safe concurrent access
- Flow of control abstractions → processes or threads
- Each thread:
- Executed by one processor or one core in multicore processors
- Have shared variables and may have private variables
Synchronized Access
- Data race: multiple threads accessing (read and write) the same shared variable
- Computation result depends on the execution order of threads (race condition)
- May lead to non-deterministic behavior
- Can be avoided using a critical section mechanism
- Critical section:
- A program part in which concurrent access should be avoided i.e. only one thread can execution at any point in time
- Use mutual exclusion (mutex) to provide critical section
Communication Operations
- Distributed memory programming models assume disjoint memory space:
- Exchange of data between processors through dedicated communication operations
- One common communication model send / receive messages between participating processors:
- known as message-passing programming model
- Two main types of data exchange: point-to-point and global communication
Principles:
- Data explicitly partitioned for each process
- All interaction requires both parties to participate
- The programmer has to explicitly express parallelism
- Loosely synchronous paradigm:
- Tasks or subsets of tasks synchronize to perform interactions
- Between these interactions, tasks execute completely asynchronously
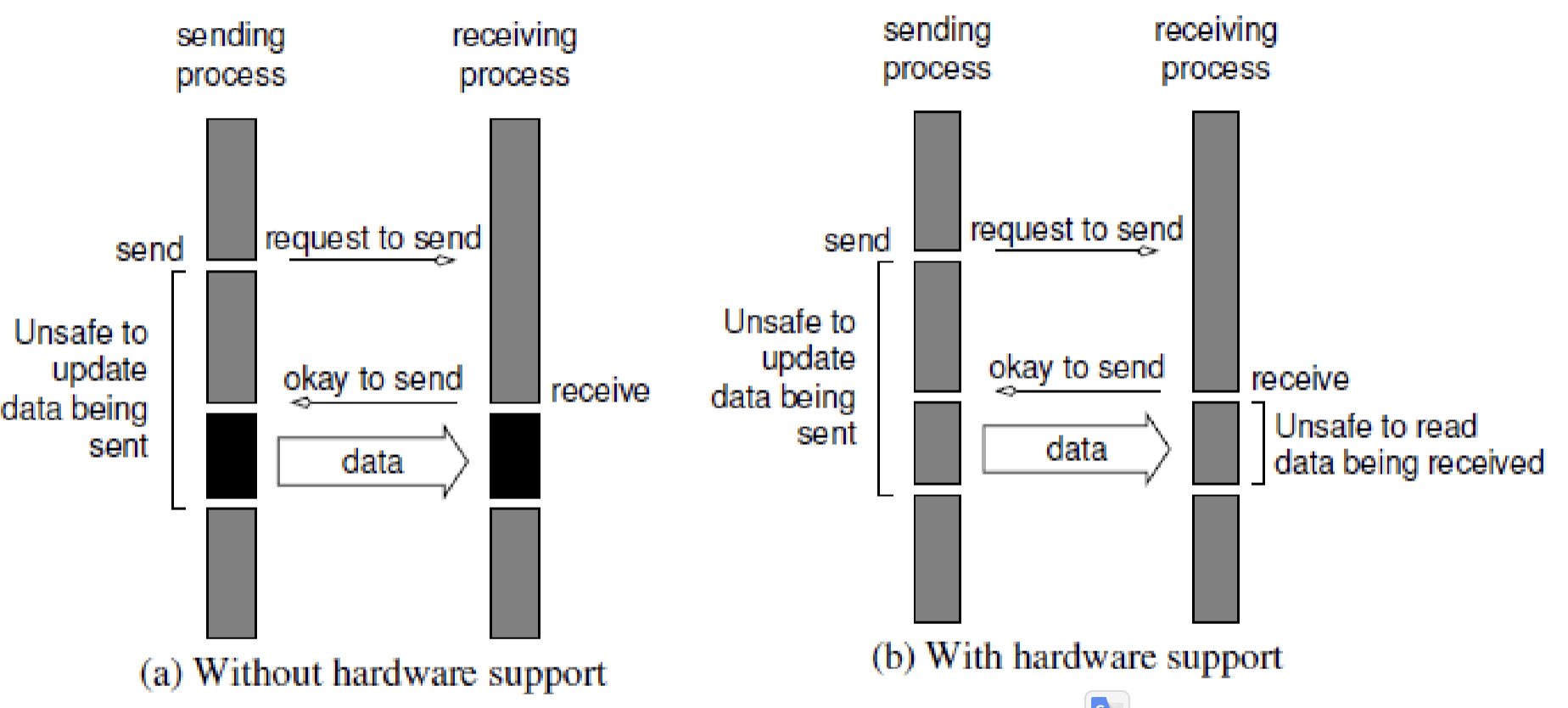
Communication Protocols
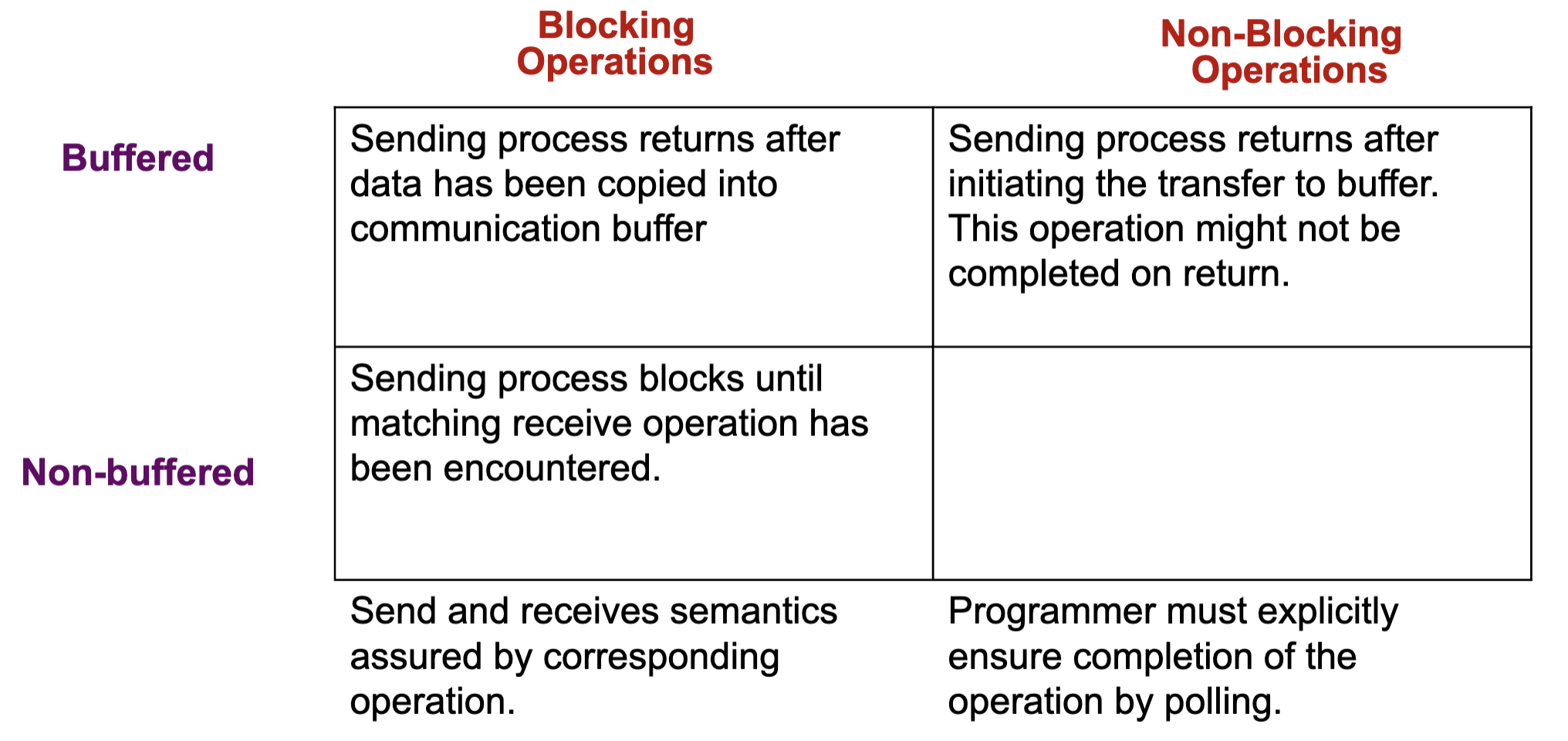
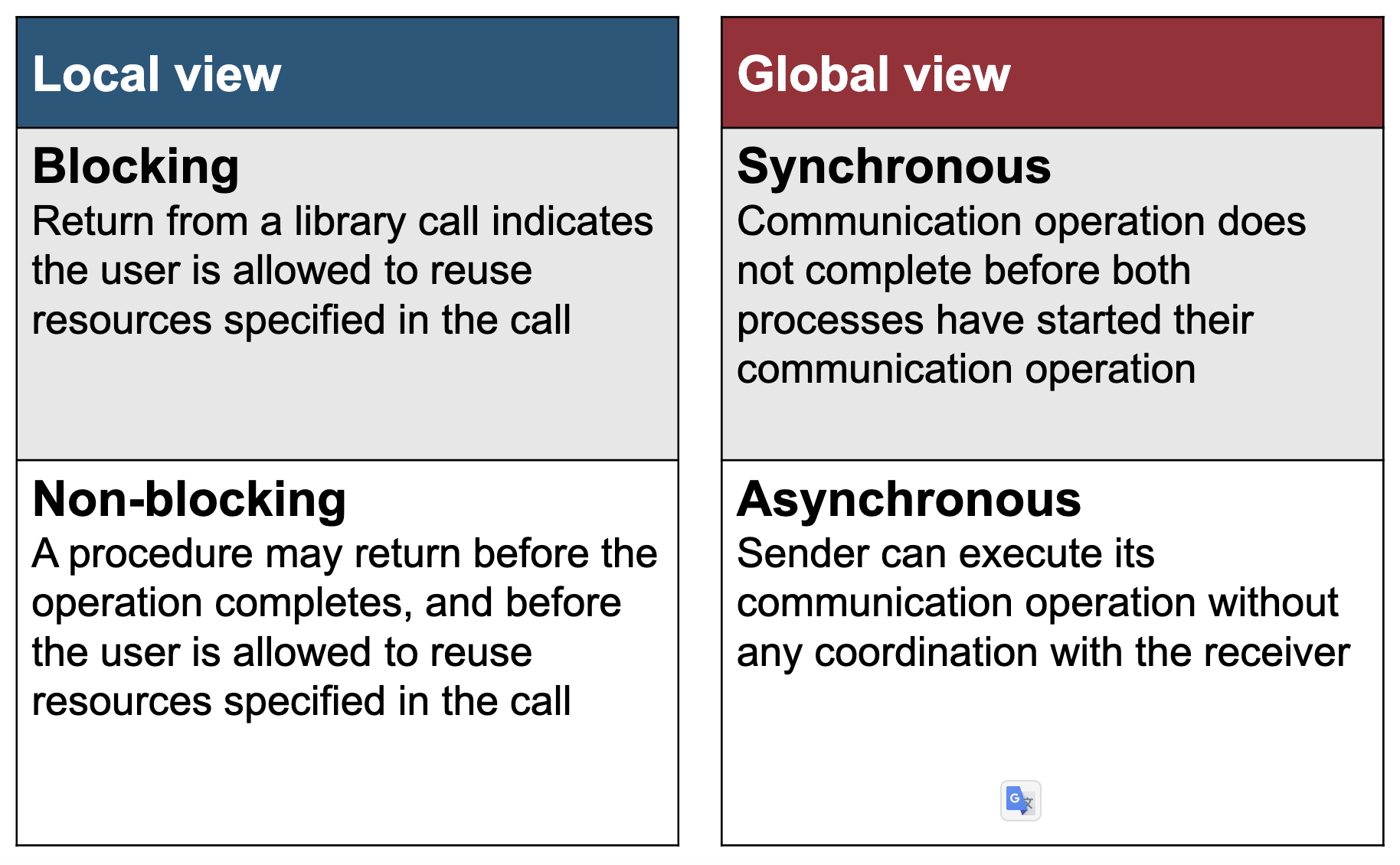
Blocking Operations
- Send operation blocks until it is safe to reuse the input buffer
- ”Safe” refers to the integrity of the data to be sent
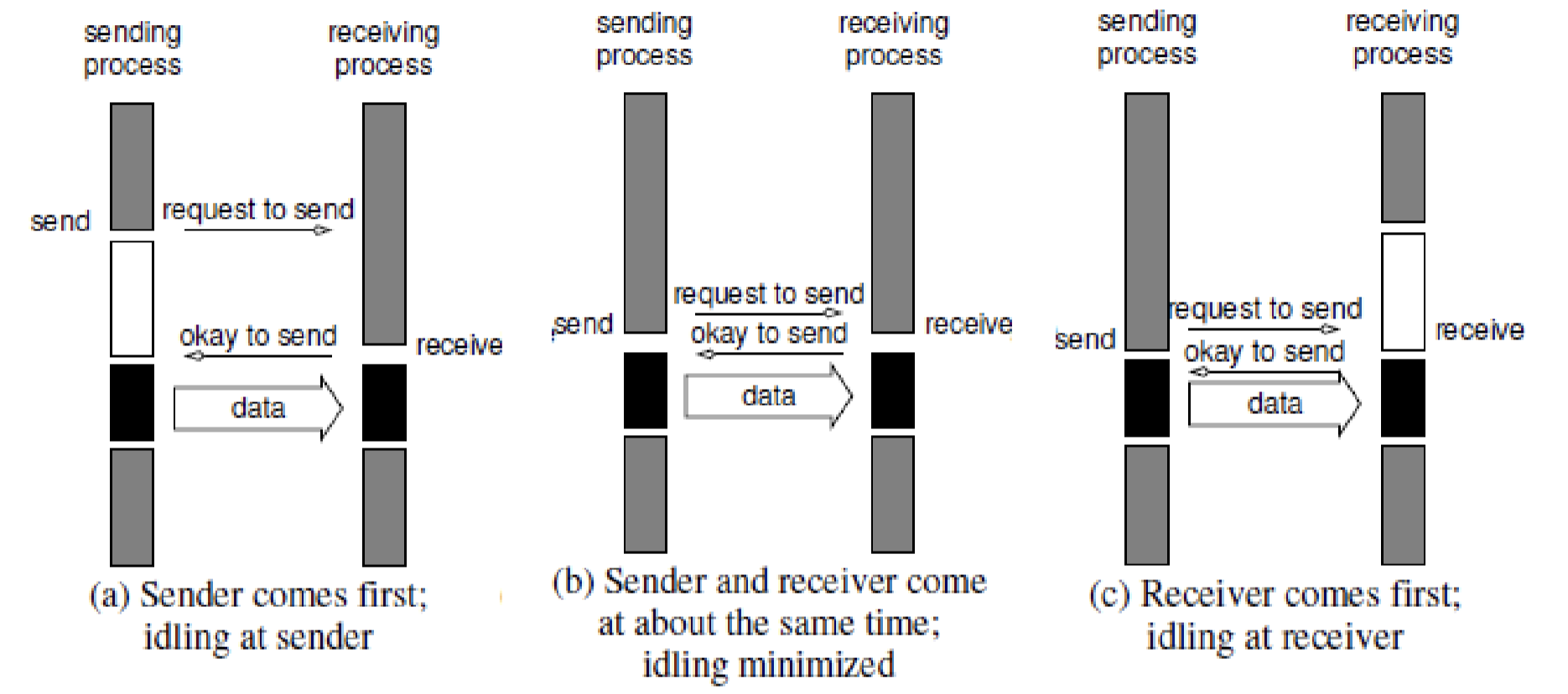
- Non-buffered blocking send:
- The operation blocks until the matching receive has been performed by the receiving process
- Idling and deadlocks are major issues with non-buffered blocking sends
Non-Buffered + Blocking Operations:
Non-buffered Blocking Operation
- Considerable idling overheads → Due to the mismatch in timing between sender and receive
Buffered Blocking Operations:
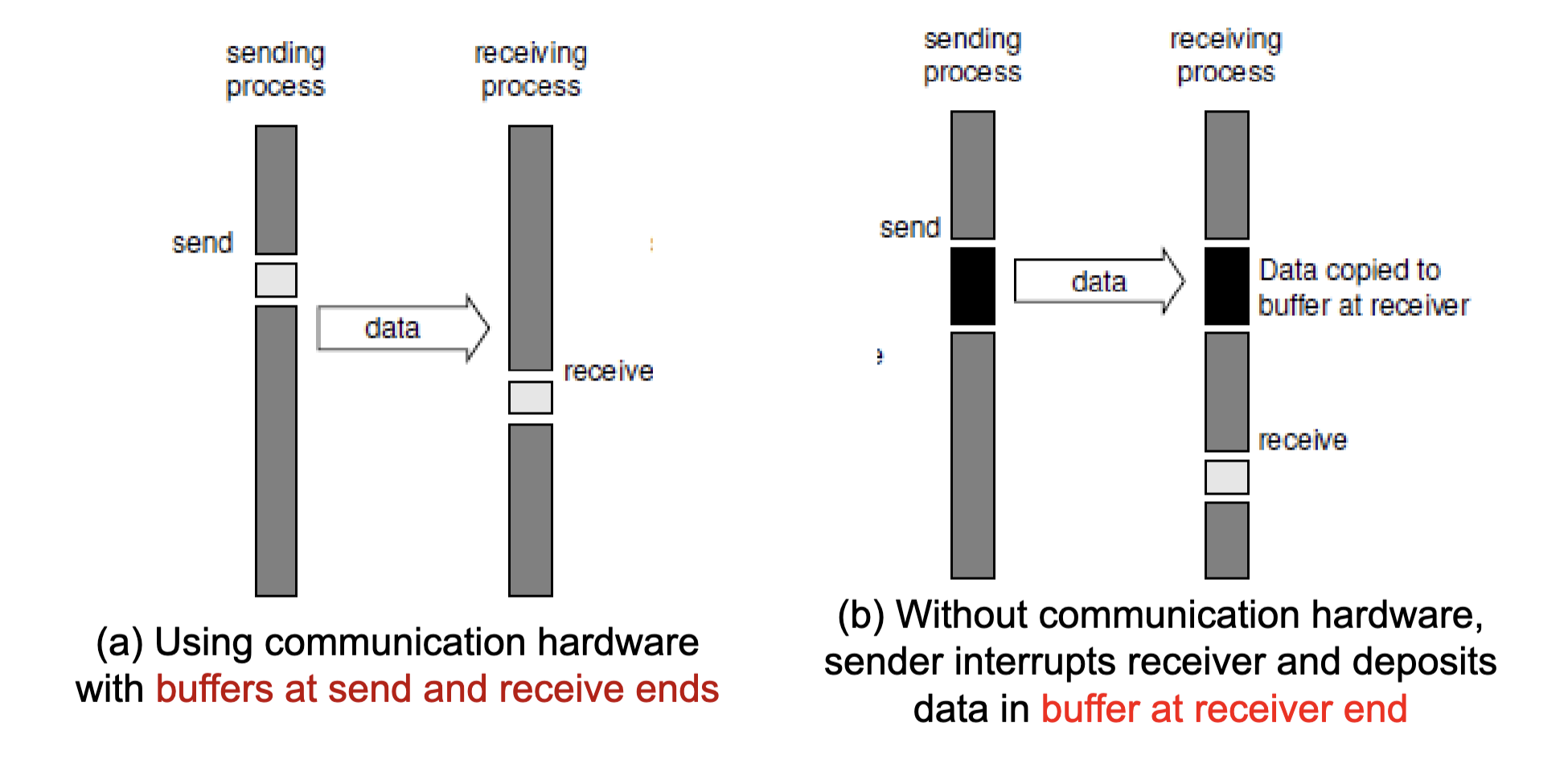
- To reduce idling overhead: Utilize buffers at both ends
- Sender simply copies the data into the designated buffer and returns after the copy operation has been completed
- Receiver similarly buffered the incoming data
- Buffering trades off idling overhead for buffer copying overhead
Buffered Blocking Operations
Bounded Buffer Size: Impact: What if consumer was much slower than producer?
Deadlock: Deadlocks are still possible with buffering since receive operations block
Non-Blocking Operations
- Send / Receive returns before it is semantically safe to use the data transferred
- Non-blocking operations are generally accompanied by a check-status operation
- The programmer must ensure the semantics of the operations
- When used correctly, these primitives are capable of overlapping communication overheads with useful computations
- Message passing libraries typically provide both blocking and non-blocking primitives
Non-Blocking + Non-Buffered Operations:
Non-buffered Non-blocking Operations
Semantics of Send/Receive Operations:
- Synchronous:
- Send completes after matching receive and source data sent
- Receive completes after data transfer completed from matching send
- Asynchronous:
- Send completes after input buffer may be reused
Synchronous Communication
Asynchronous Communication