Midterm notes
Introduction
Storage hierarchy
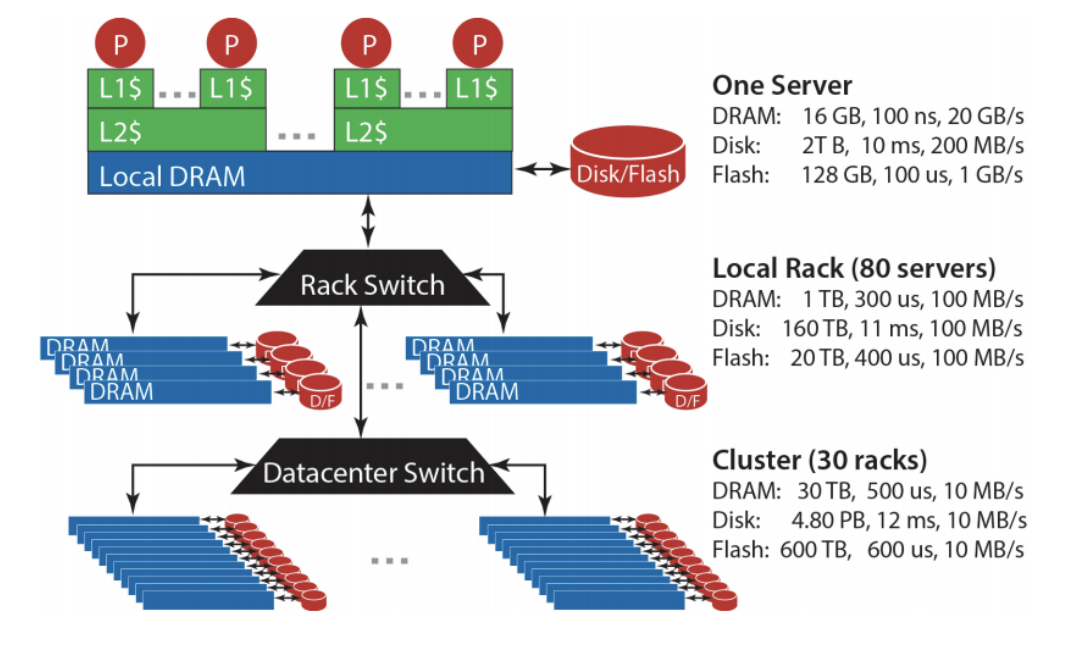
Bandwidth vs Latency
Bandwidth: maximum amount of data that can be transmitted per unit time (e.g. in GB/s)
Latency: time taken for 1 packet to go from source to destination (one-way) or from source to destination back to source (round trip), e.g. in ms
When transmitting a large amount of data, bandwidth tells us roughly how long the transmission will take. When transmitting a very small amount of data, latency tells us how much delay there will be. Throughput is similar to bandwidth, but instead of referring to capacity, it refers to the rate at which some data was actually transmitted across the network during some period of time.
“Big Ideas” of Massive Data Processing in Data Centers
Scale “out”, not “up”:
- scale ‘out’ = combining many cheaper machines; scale ‘up’: increasing the power of each individual machine
- Also called ’horizontal’ vs ‘vertical’ scaling
Move processing to the data:
- Clusters have limited bandwidth: we should move the task to the machine where the data is stored
Process data sequentially, avoid random access. Seeks are expensive, disk throughput is reasonable
Seamless scalability:
- E.g. if processing a certain dataset takes 100 machine hours, ideal scalability is to use a cluster of 10 machines to do it in about 10 hours.
MapReduce
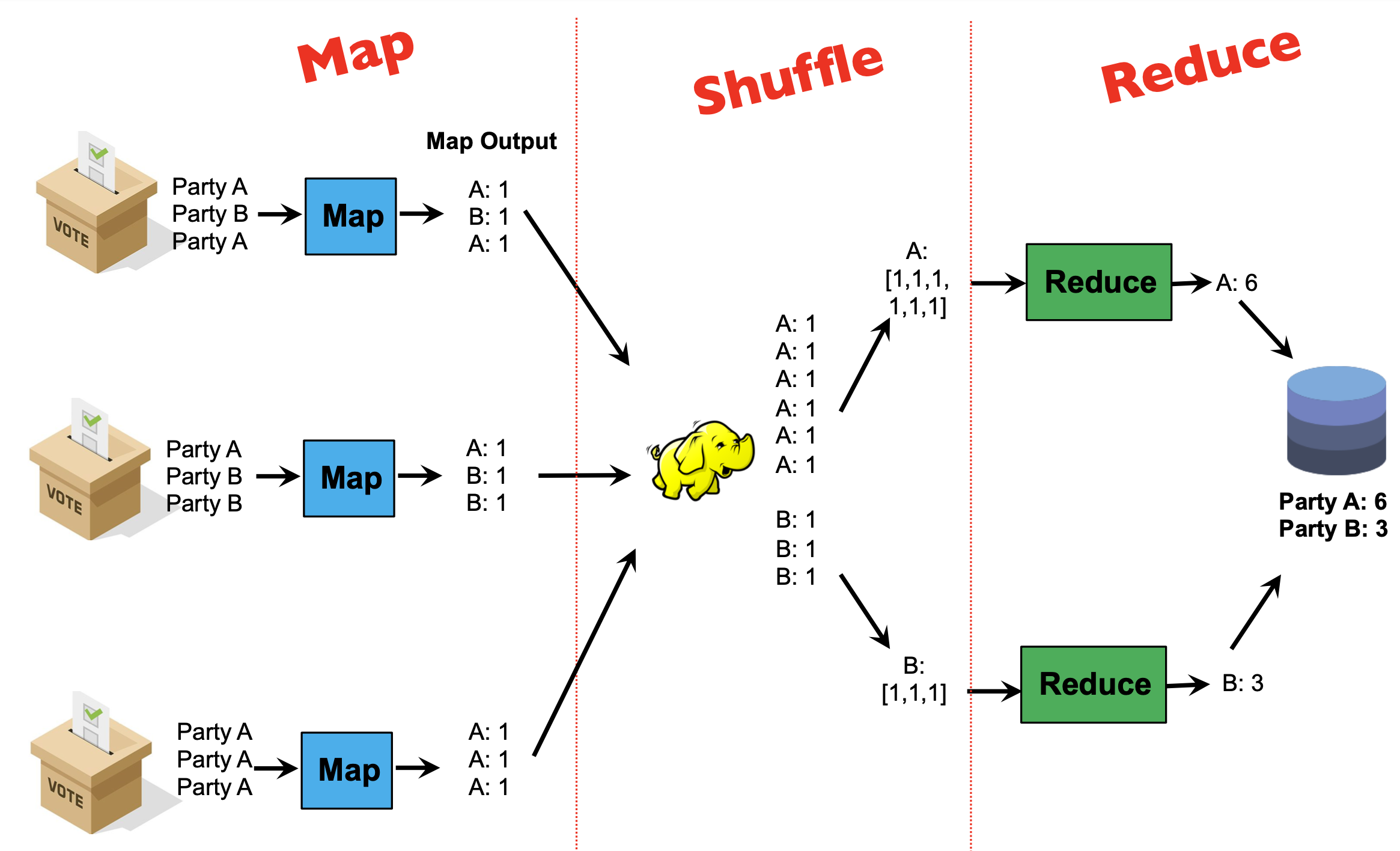
Programmers specify two functions:
map (k1, v1) → List(k2, v2)reduce (k2, List(v2)) → List(k3, v3)- All values with the same key are sent to the same reducer
The execution framework handles the challenging issues…
- How do we assign work units to workers?
- What if we have more work units than workers? l What if workers need to share partial results?
- How do we aggregate partial results?
- How do we know all the workers have finished? l What if workers die/fail?
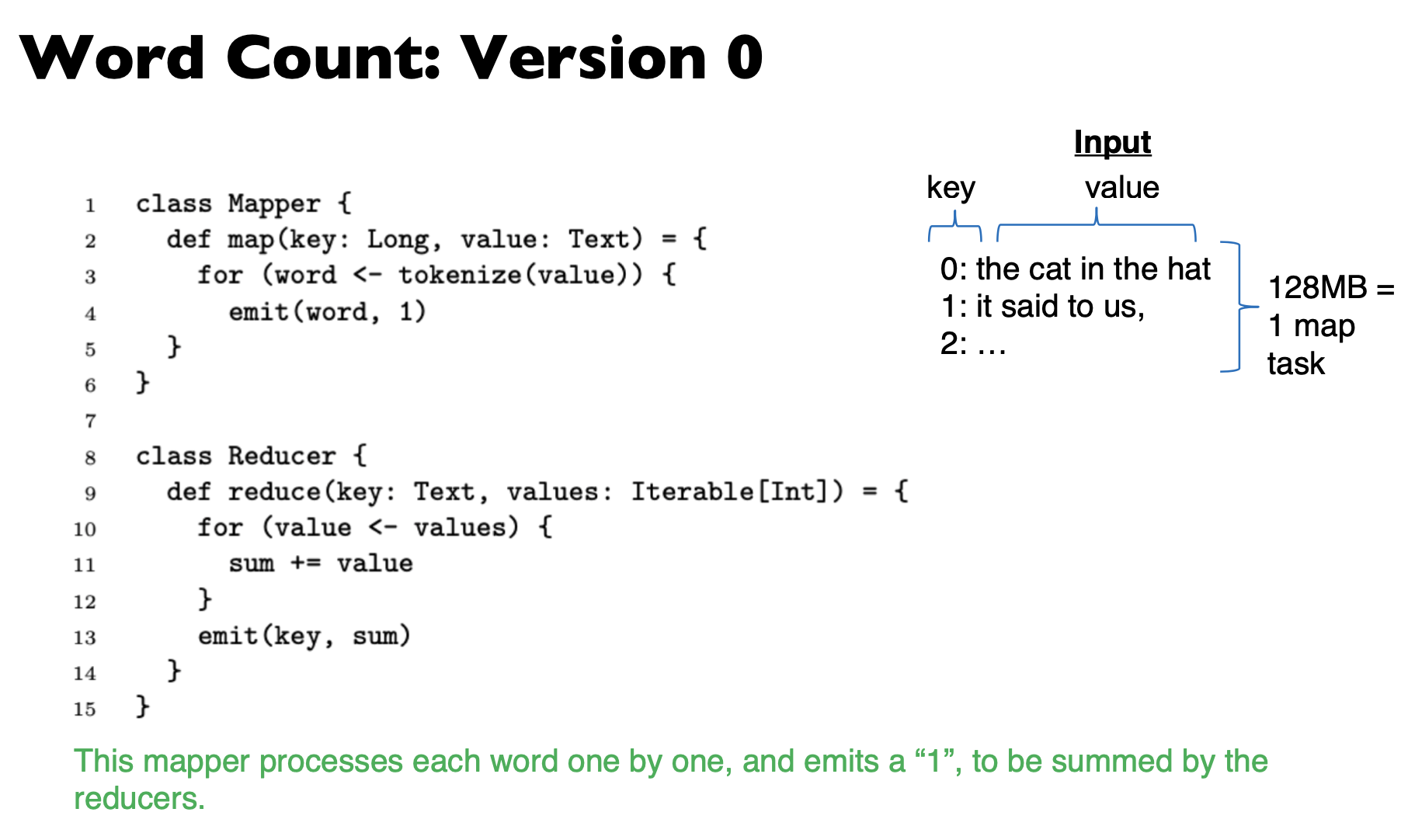
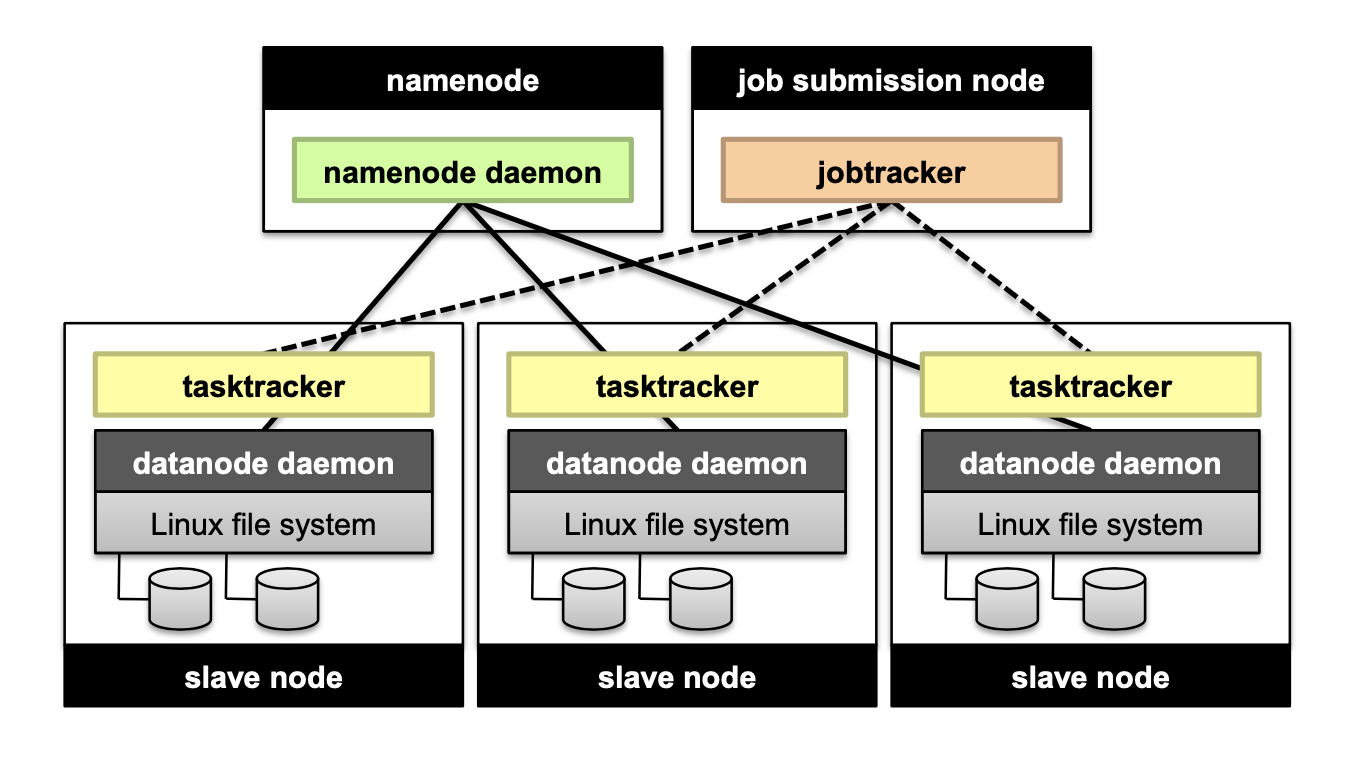
MapReduce implementation
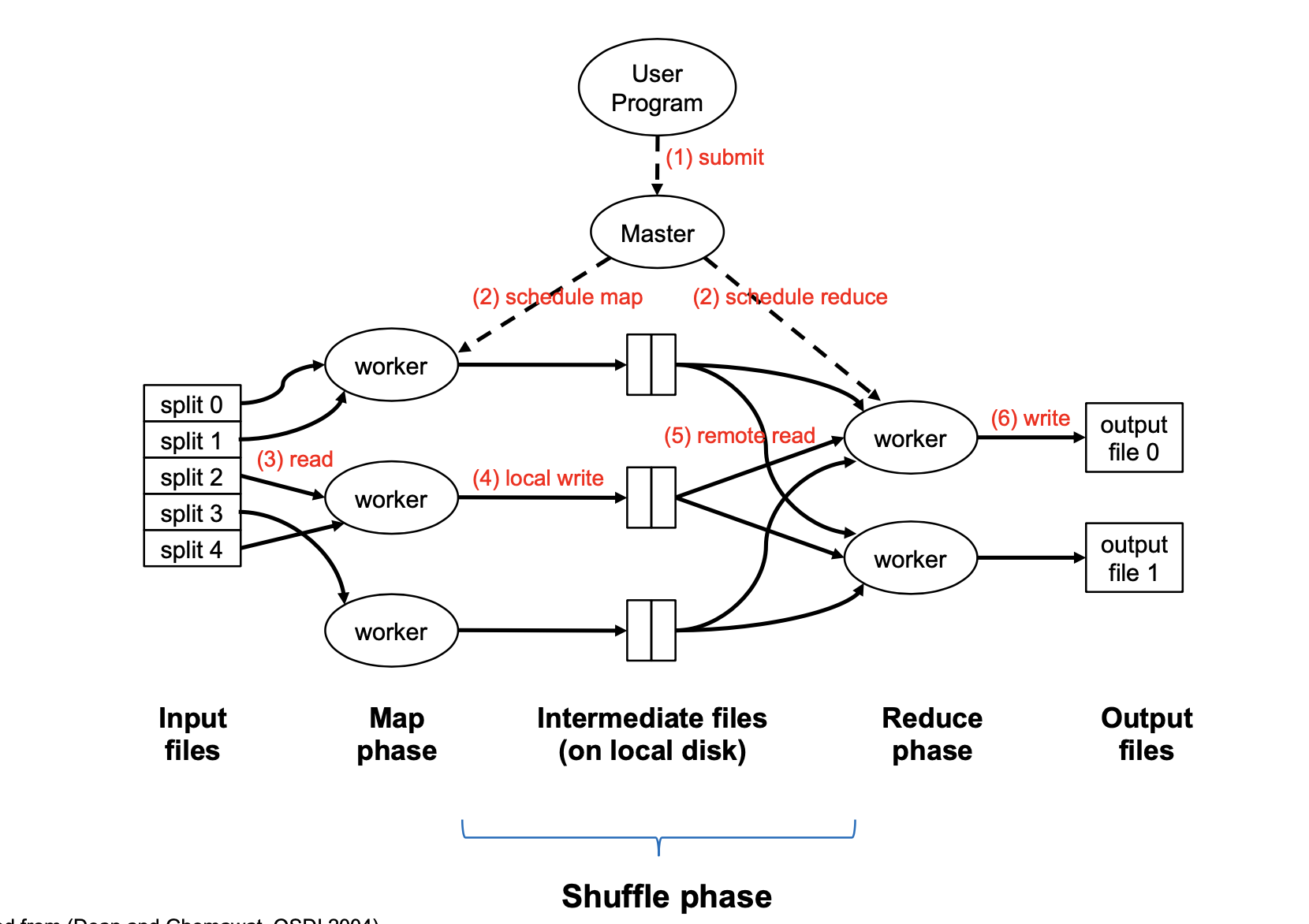
Map Task is a basic unit of work; it is typically 128MB. In the beginning, the input is broken into splits of 128MB. A map task is a job required to process one split; not a physical machine.
A single physical machine (or worker) can handle multiple map tasks. Typically, when a machine completes a map task (e.g. split 0), it is re-assigned to another task (e.g. split 3)
A “mapper” or “reducer” will generally refer to the process of executing a map or reduce task, not to physical machines.
“Map Function” is a single call to the user-defined map (k1, v1) → List(k2, v2) function.
Barrier between map and reduce phases. But we can begin copying intermediate data earlier
Keys arrive at each reducer in sorted order. No enforced ordering across reducers.
Usually, programmers optionally also specify partition and combine functions. These are an optional optimization to reduce network traffic.
Partition step
By default, the assignment of keys to reducers is determined by a hash function, e.g., key k goes to reducer (hash(k) mod num_reducers)
Users can optionally implement a custom partition, e.g. to better spread out the load among reducers (if some keys have much more values than others)
Combiner step
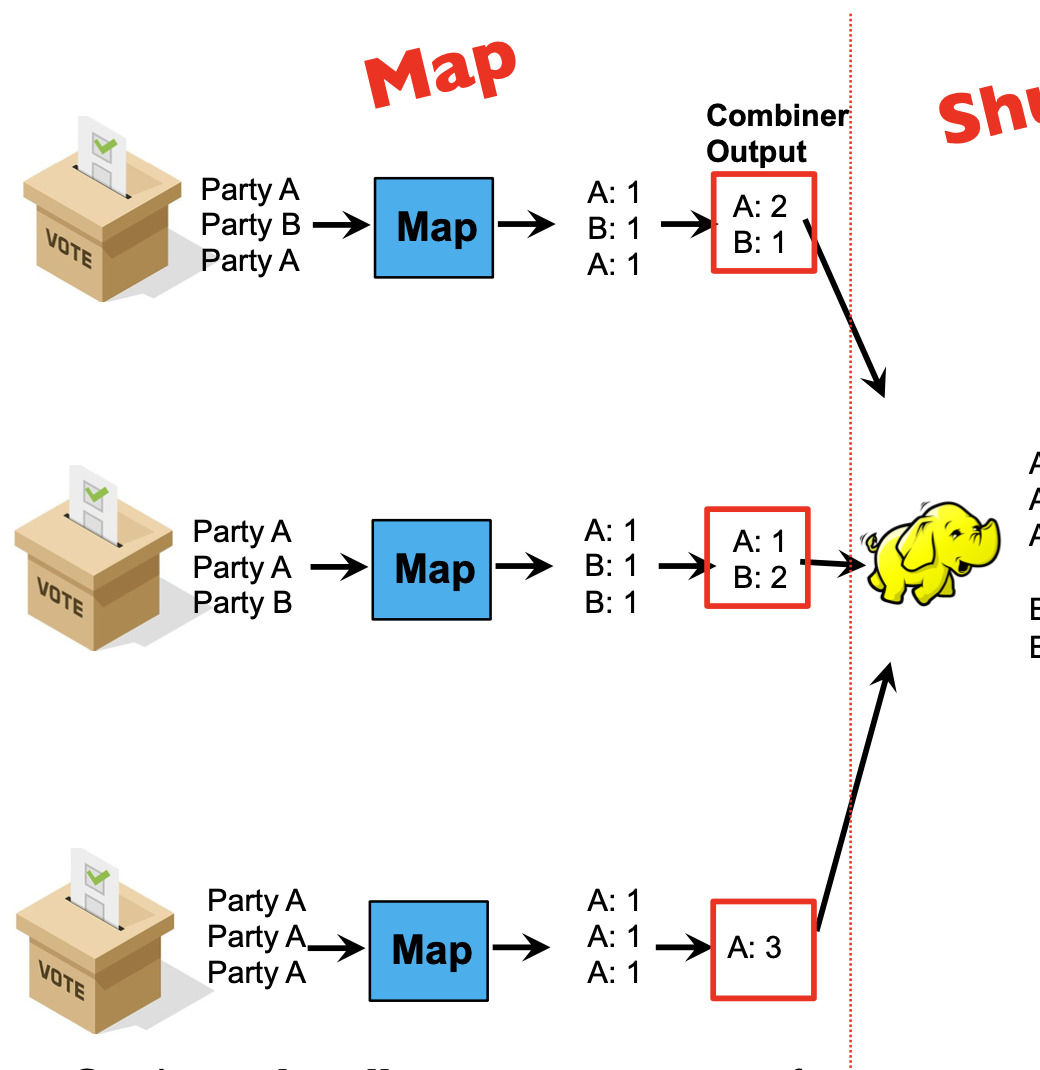
Combiners locally aggregate output from mappers.
Combiners are ‘mini-reducers’: in this example, combiner and reducer are the same functions!
It is the user’s responsibility to ensure that the combiner does not affect the correctness of the final output, whether the combiner runs 0, 1, or multiple times
E.g: in the election example, the combiner and reducer are a “sum” over values with the same key. Summing can be done in any order without affecting correctness. The same holds for “max” and “min”
In general, it is correct to use reducers as combiners if the reduction involves a binary operation that is both
- Associative: a+(b+c)=(a+b)+c
- Commutative: a+b=b+a
Example
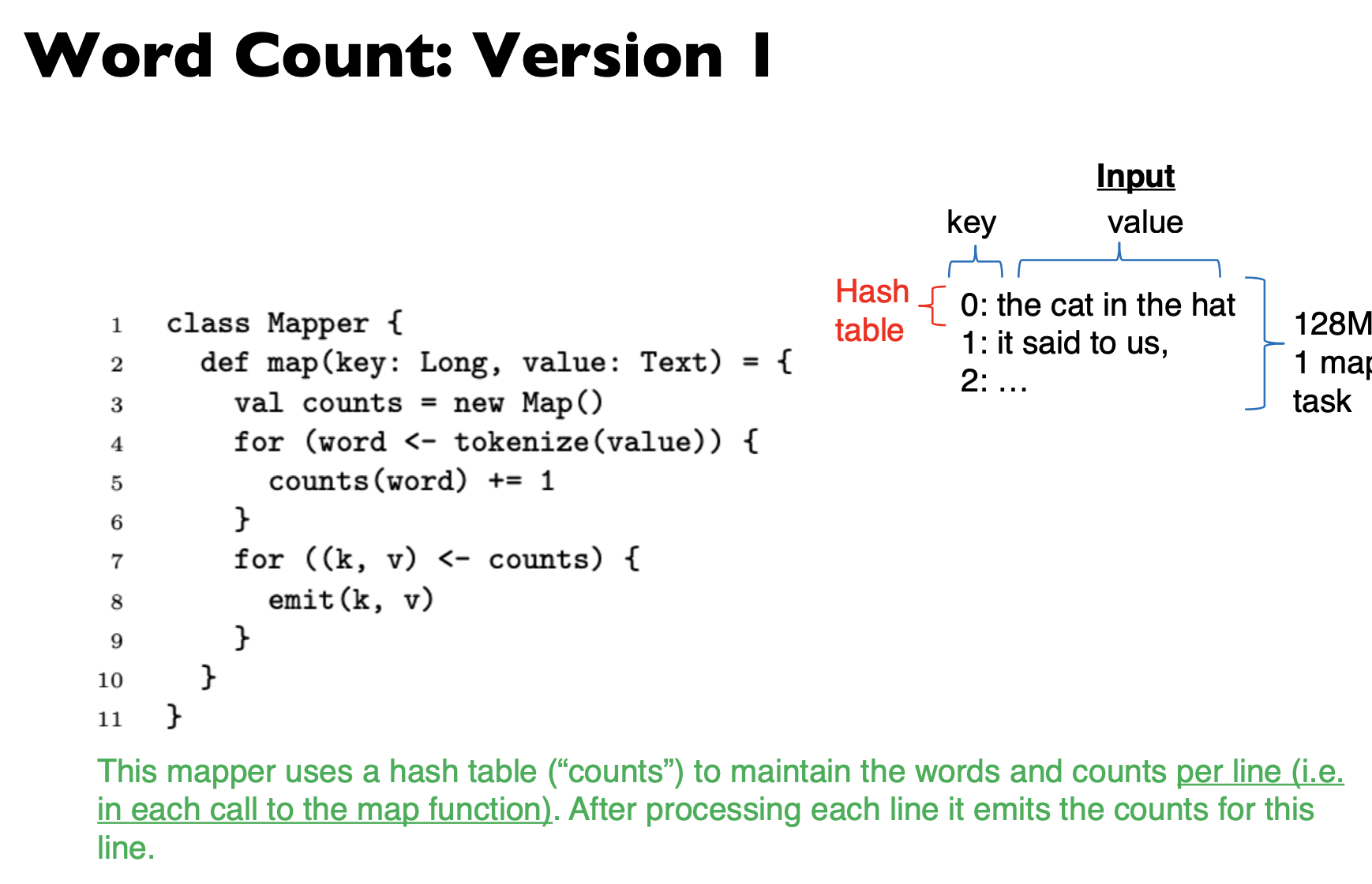
This mapper uses a hash table (“counts”) to maintain the words and counts per line (i.e. in each call to the map function). After processing each line it emits the counts for this line.
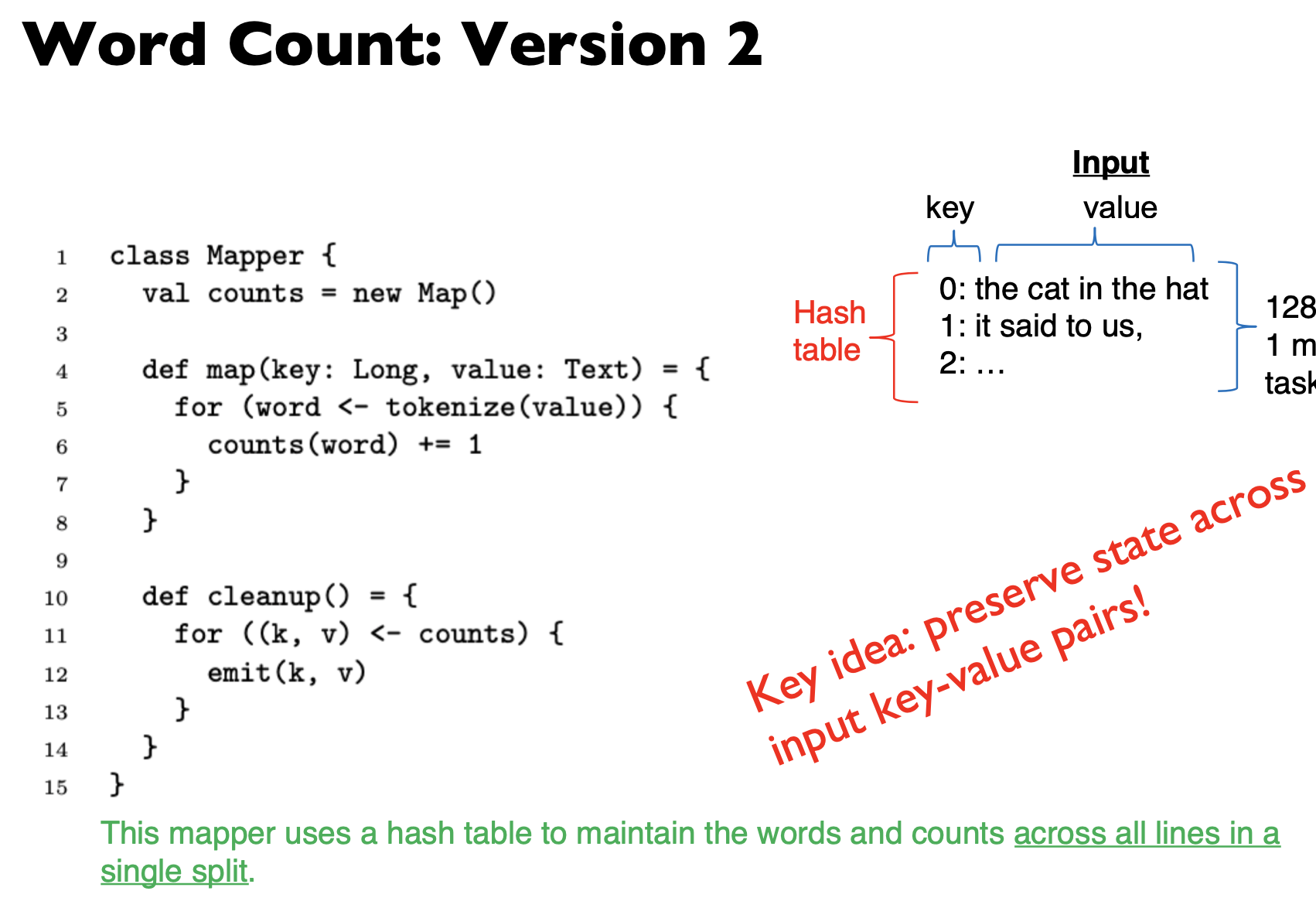
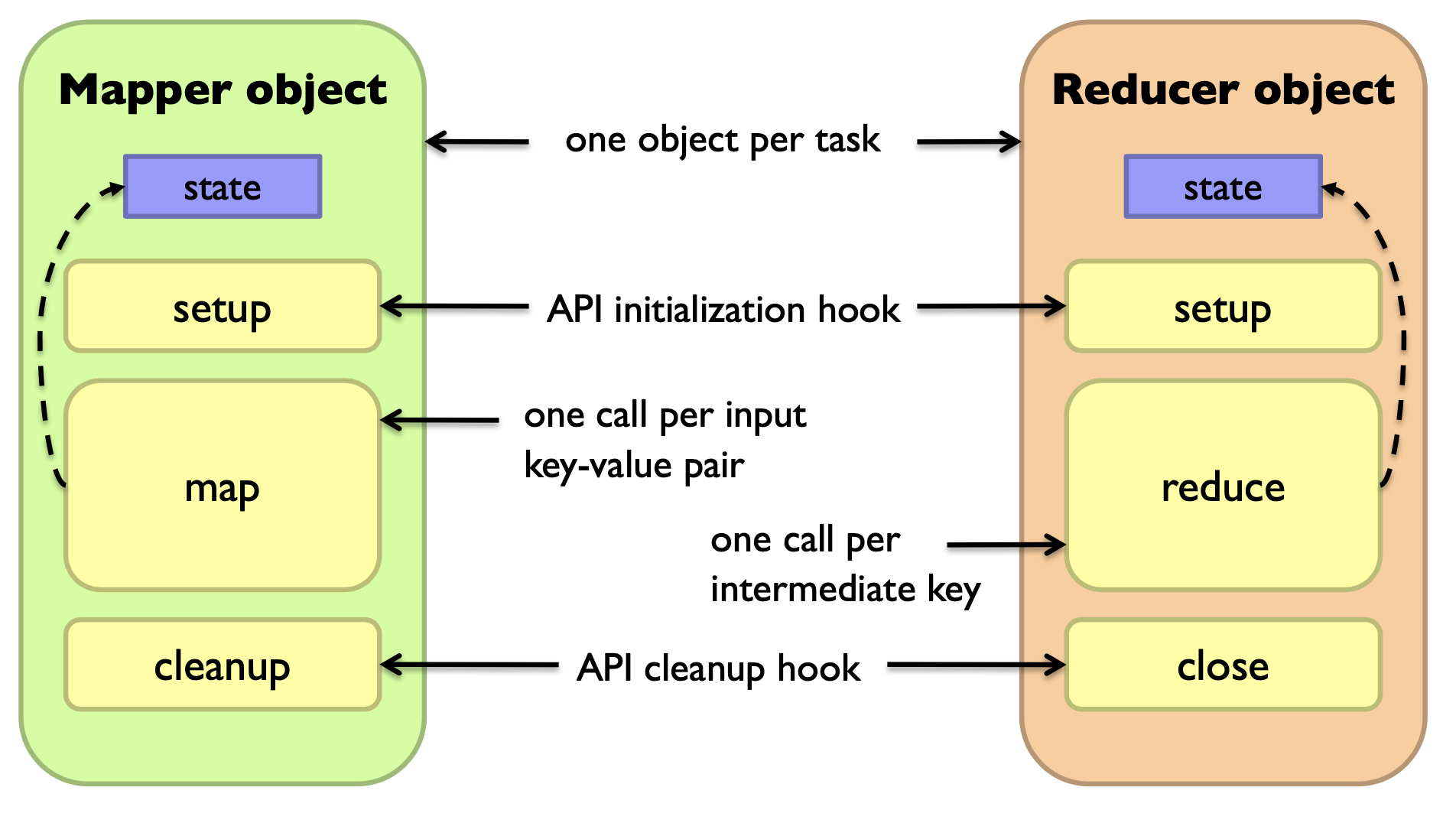
Preserving State in Mappers / Reducers
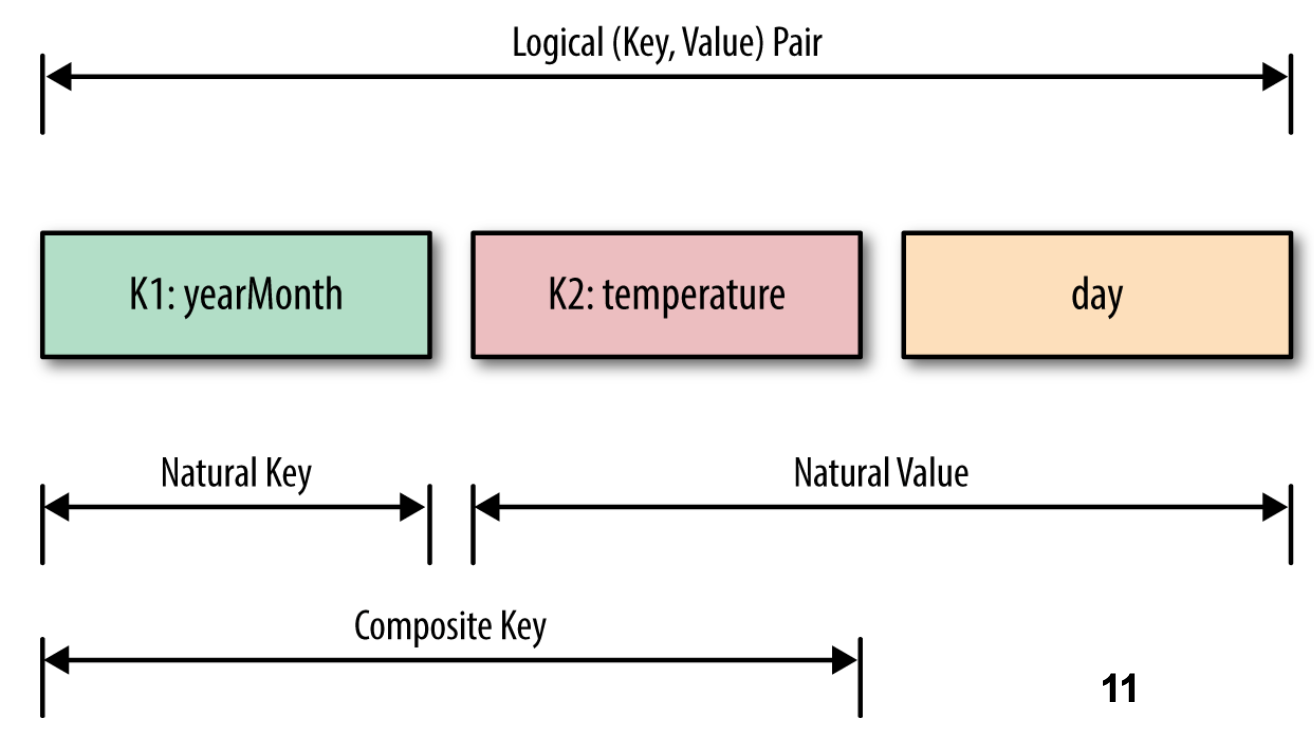
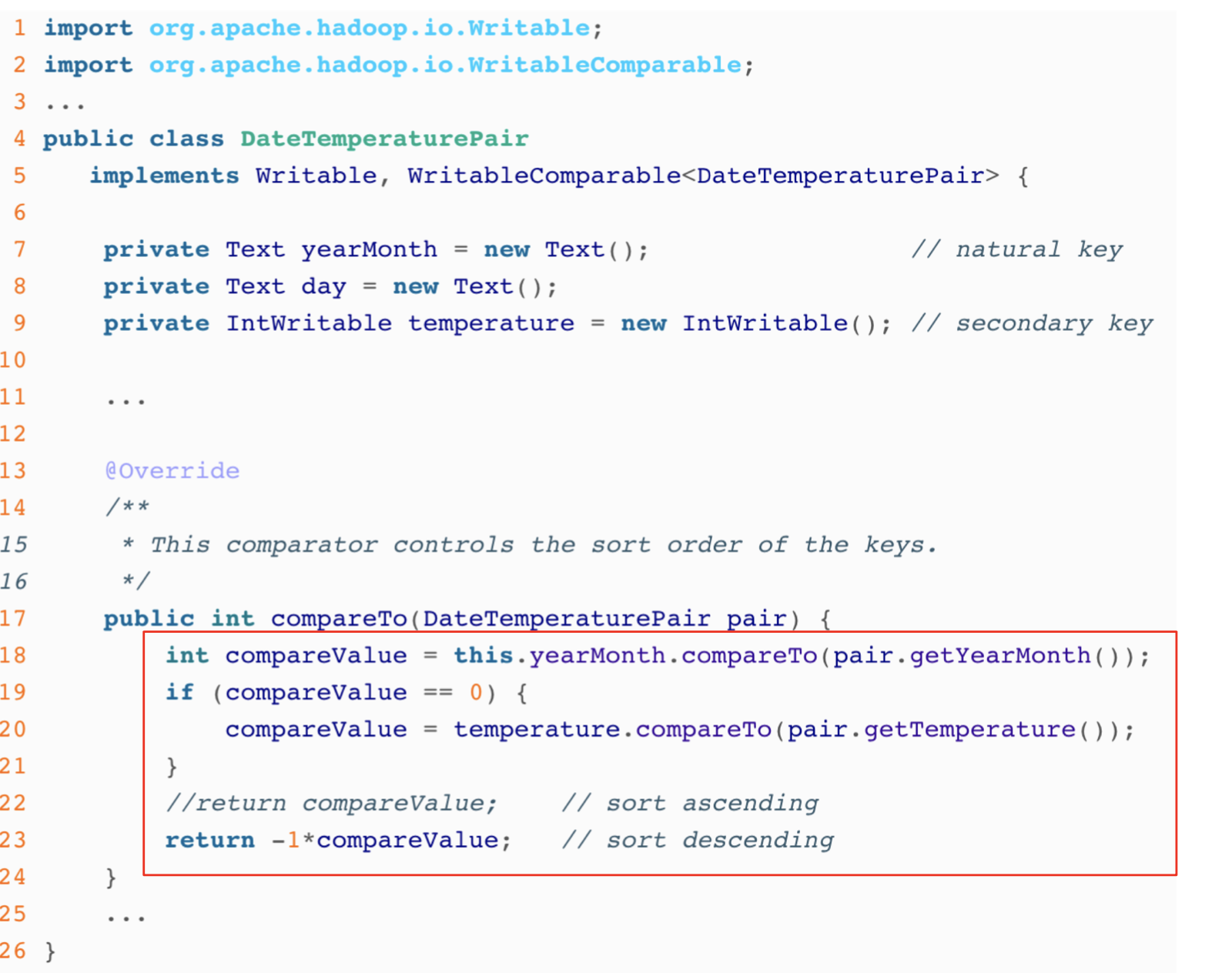
Secondary sort
Problem: each reducer’s values arrive unsorted. But what if we want them to be sorted (e.g. sorted by temperature)?
Solution: define a new ‘composite key’ as (K1, K2), where K1 is the original key (“Natural Key”) and K2 is the variable we want to use to sort
Partitioner: now needs to be customized, to partition by K1 only, not (K1, K2)
Performance Guidelines for Basic Algorithmic Design
- Linear scalability: more nodes can do more work at the same time
- Linear on data size
- Linear on computer resources
- Minimize the amount of I/Os in hard disk and network
- Minimize disk I/O; sequential vs. random.
- Minimize network I/O; bulk send/recvs vs. many small send/recvs
- Memory working set of each task/worker
- Large memory working set → high probability of failures.
Guidelines are applicable to Hadoop, Spark, …
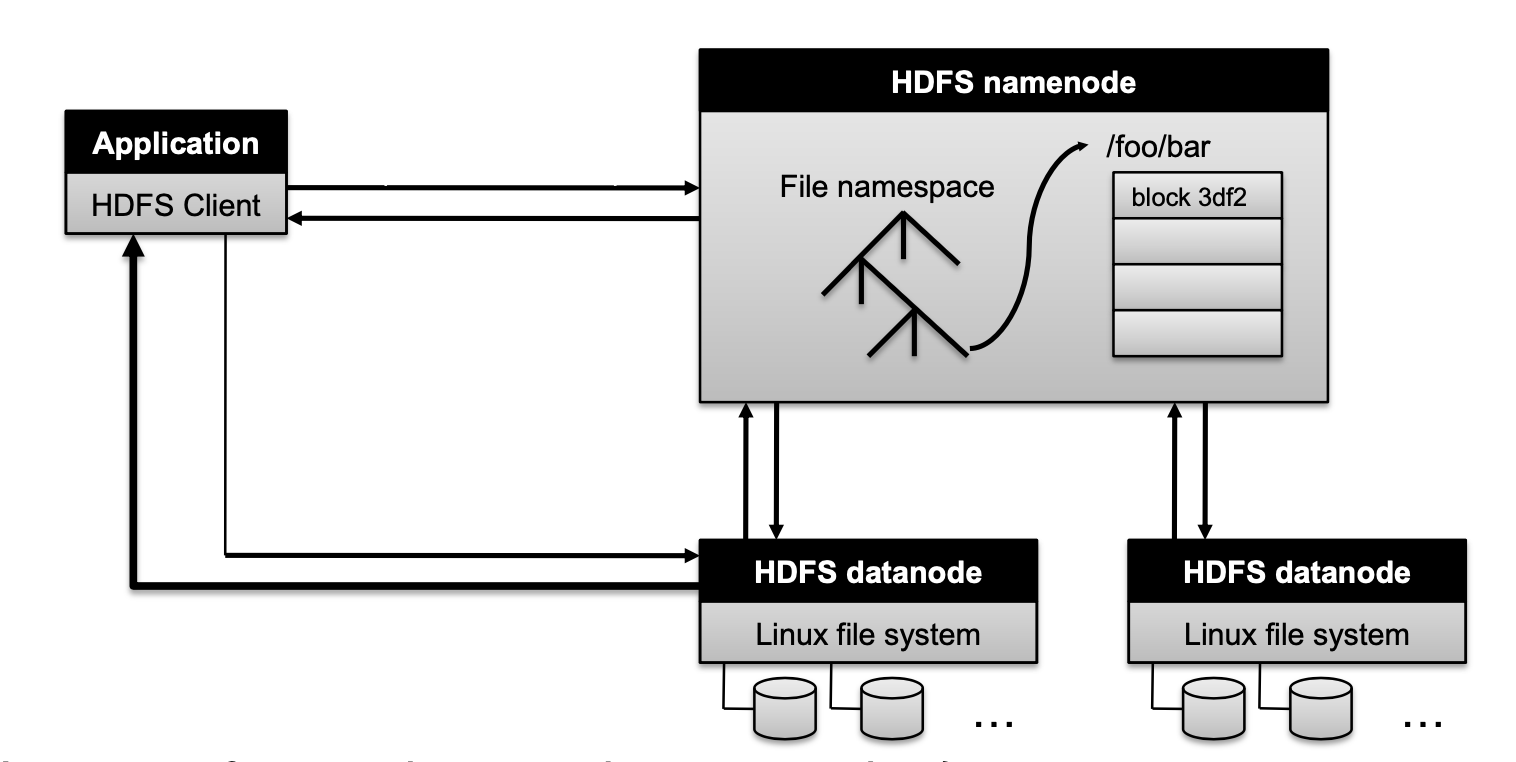
Hadoop File System
Don’t move data to workers… move workers to the data!
- Store data on the local disks of nodes in the cluster
- Start up the workers on the node that has the data local
A distributed file system is the answer
- GFS (Google File System) for Google’s MapReduce
- HDFS (Hadoop Distributed File System) for Hadoop
GFS/HDFS assumptions
Commodity hardware instead of “exotic” hardware → Scale “out”, not “up”
High component failure rates. Inexpensive commodity components fail all the time
“Modest” number of huge files
Files are write-once, mostly appended to
Large streaming reads instead of random access → High sustained throughput over low latency
Design decisions
Files stored as chunks → Fixed size (64MB for GFS, 128MB for HDFS)
Reliability through replication → Each chunk replicated across 3+ chunk servers
Single master to coordinate access, and keep metadata → Simple centralized management
HDFS Architeccture
How to perform replication when writing data?
- Namenode decides which datanodes are to be used as replicas. The 1st datanode forwards data blocks to the 1st replica, which forwards them to the 2nd replica, and so on.
Namenode responsibility
Managing the file system namespace:
- Holds file/directory structure, metadata, file-to-block mapping, access permissions, etc. Coordinating file operations:
- Directs clients to datanodes for reads and writes
- No data is moved through the namenode
Maintaining overall health:
- Periodic communication with the datanodes
- Block re-replication and rebalancing
- Garbage collection
What if the namenode’s data is lost?
- All files on the filesystem cannot be retrieved since there is no way to reconstruct them from the raw block data. Fortunately, Hadoop provides 2 ways of improving resilience, through backups and secondary namenodes
MapReduce and relational database
Projection in MapReduce
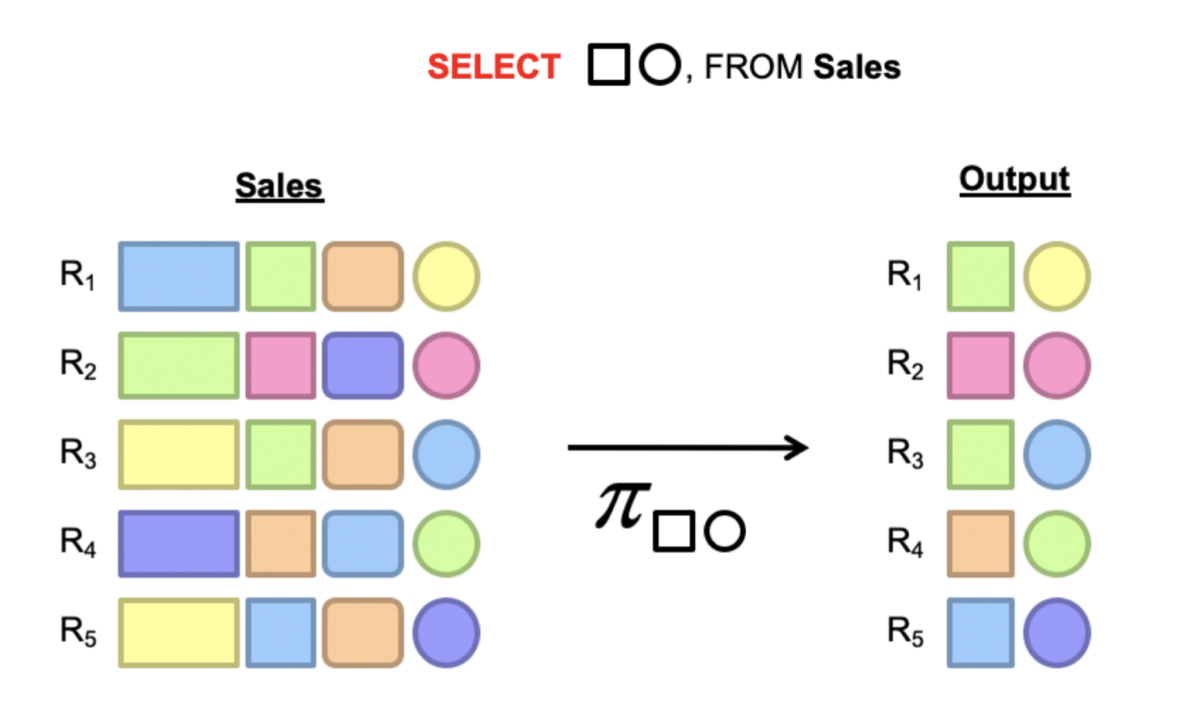
Map: take in a tuple (with tuple ID as key), and emit new tuples with appropriate attributes
No reducer needed (⇒ no need shuffle step)
Selection in MapReduce
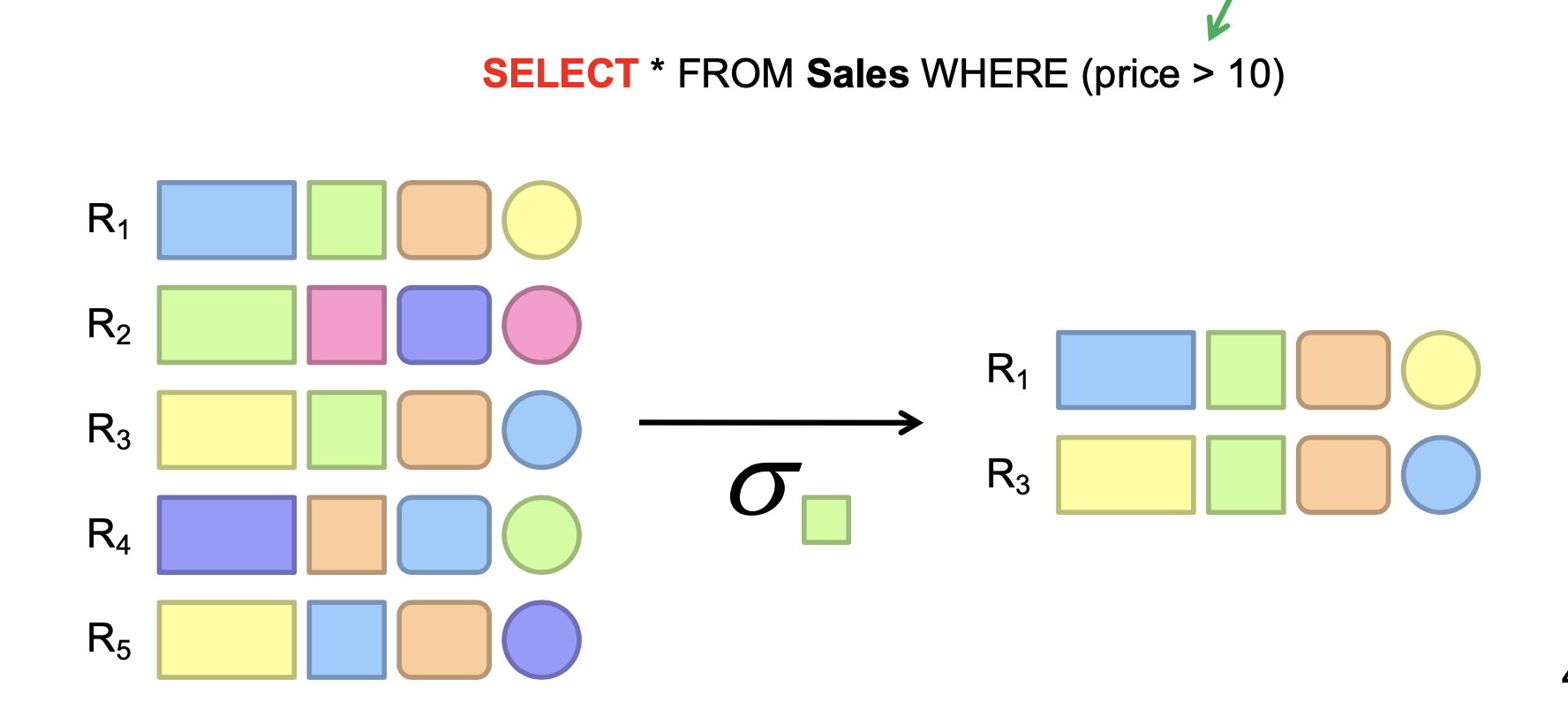
Map: take in a tuple (with tuple ID as key), and emit only tuples that meet the predicate.
No reducer needed
Aggregation GROUP BY
Example: What is the average sale price per product?
In SQL: SELECT product_id, AVG(price) FROM sales GROUP BY product_id
In MapReduce:
- Map over tuples, emit
<product_id, price> - Framework automatically groups values by keys
- Compute average in reducer
- Optimize with combiners
Inner join
Method 1: Broadcast join
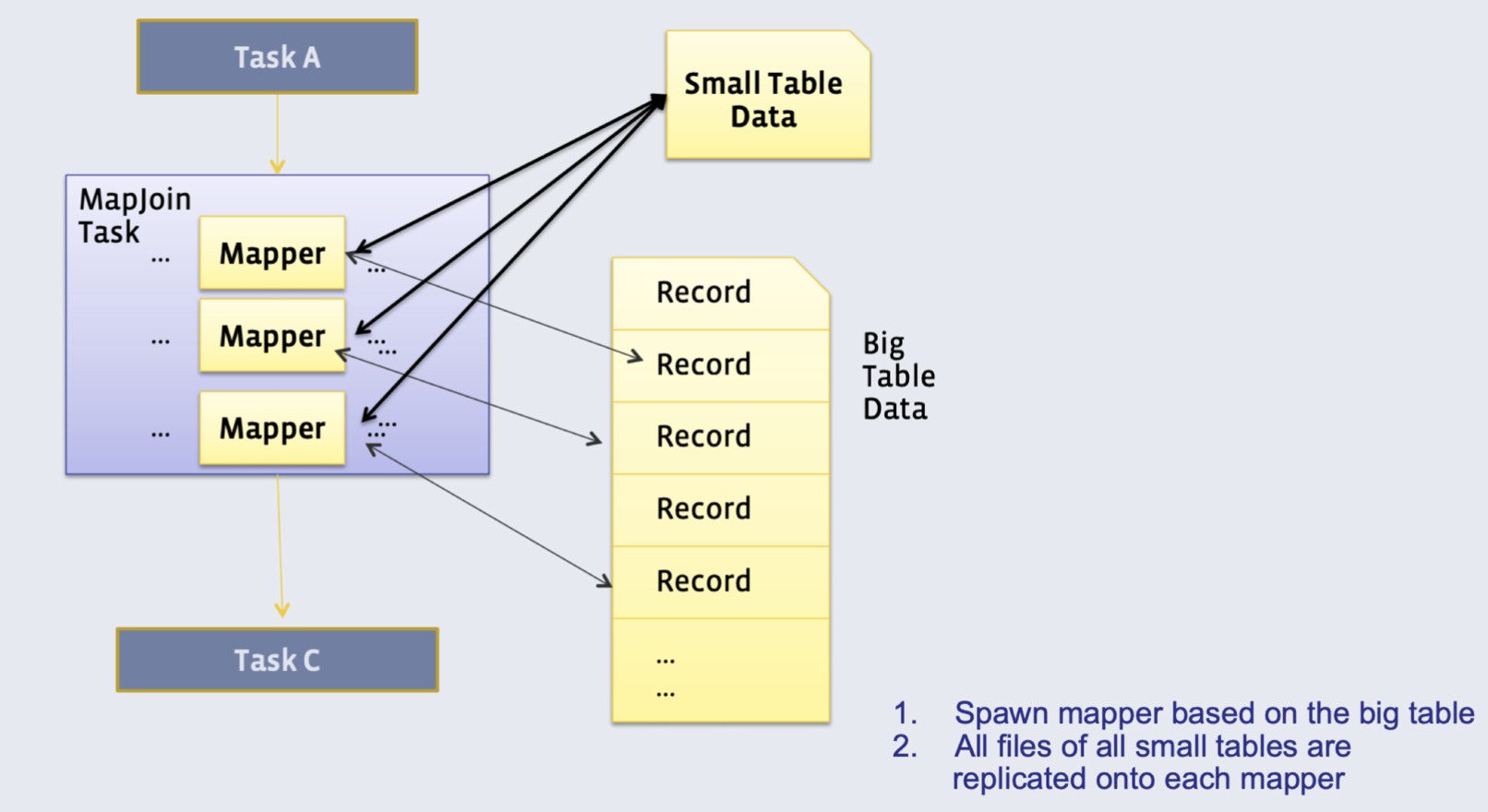
Requires one of the tables to fit in memory
- All mappers store a copy of the small table (for efficiency: we convert it to a hash table, with keys as the keys we want to join by)
- They iterate over the big table, and join the records with the small table
Method 2: Reduce-side (’Common’) join
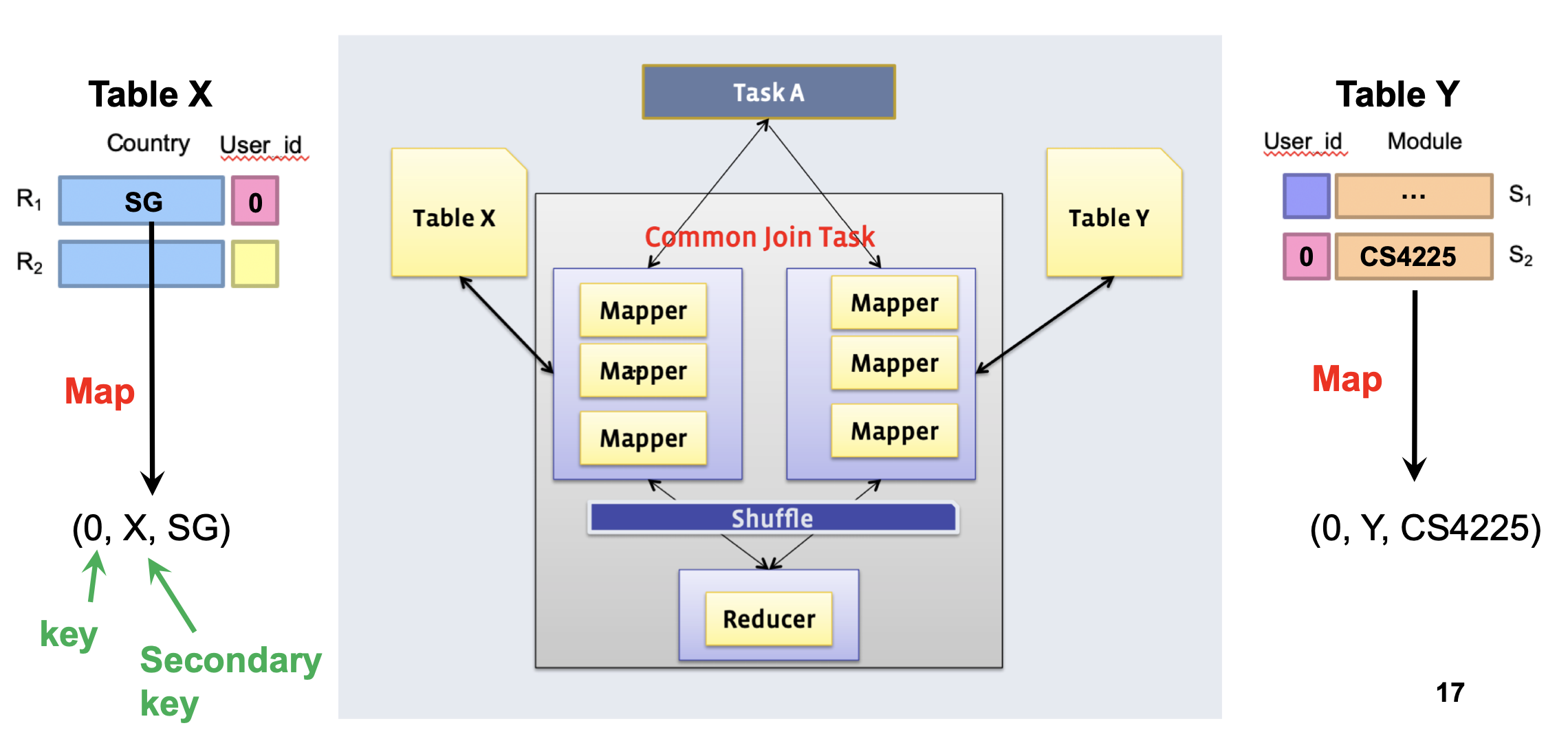
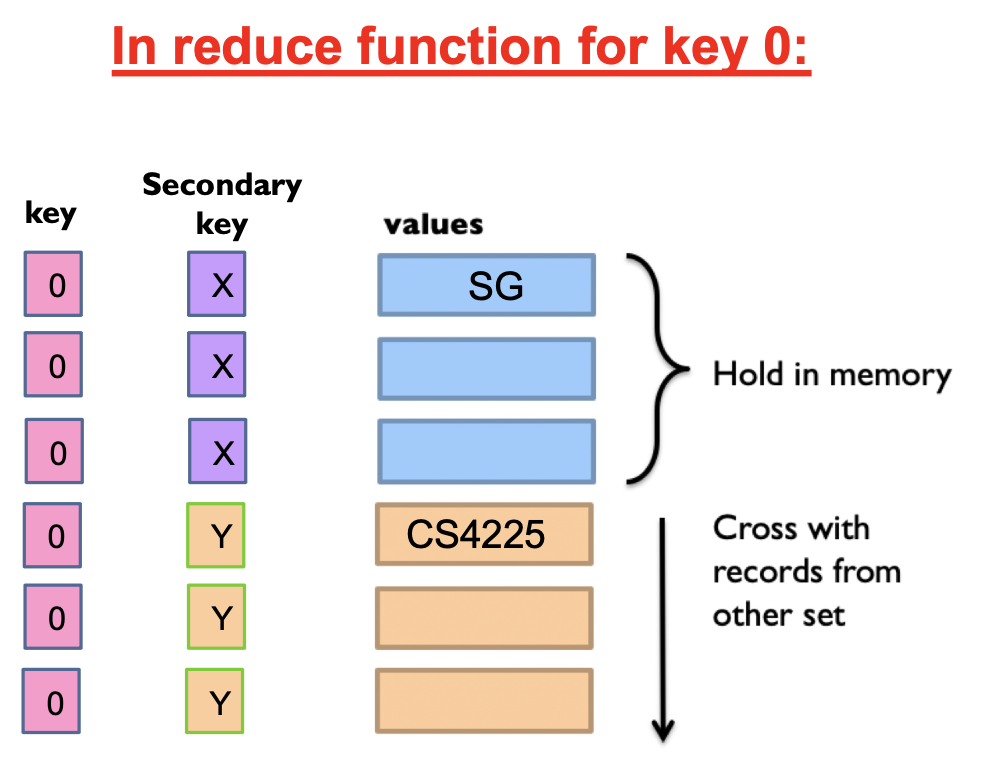
Doesn’t require a dataset to fit in memory, but slower than map-side join
- Different mappers operate on each table, and emit records, with key as the variable to join by
In reducer: we can use secondary sort to ensure that all keys from table X arrive before table Y
- Then, hold the keys from table X in memory and cross them with records from table Y
Similarity search
Euclidean distance, Manhattan distance
Cosine similarity:
Jaccard similarity:
Jaccard distance:
Finding Similar Documents
All pairs similarity: Given a large number N of documents, find all “near duplicate” pairs, e.g. with Jaccard distance below a threshold Similarity search: Given a query document D, find all documents which are “near duplicates” with D
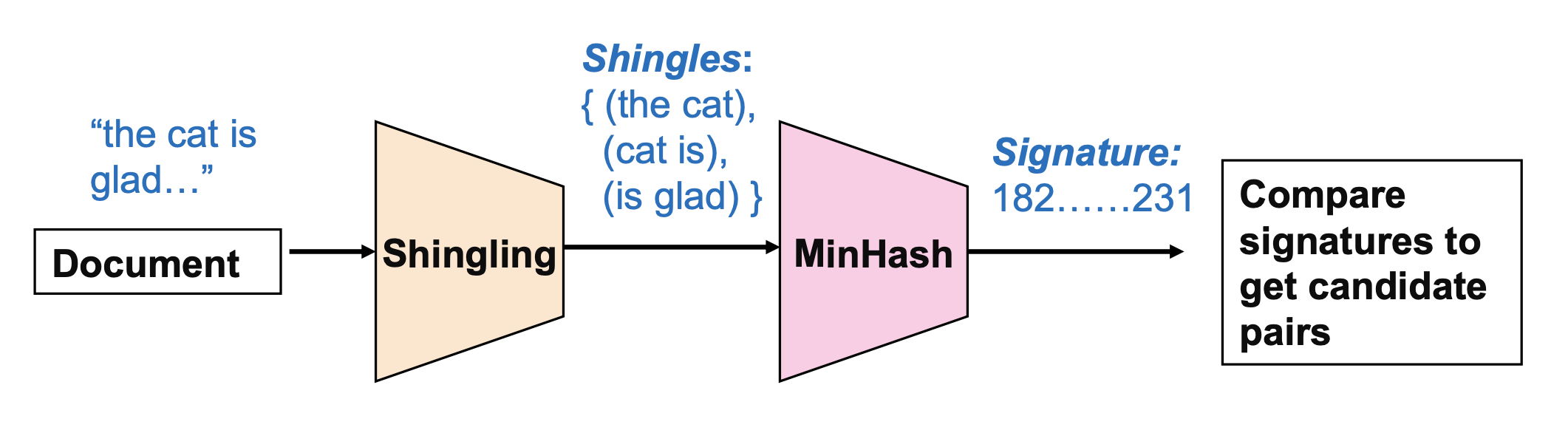
Shingling: Convert documents to sets of short phrases (“shingles”)
Min-Hashing: Convert these sets to short “signatures” of each document, while preserving similarity
- A “signature” is just a block of data representing the contents of a document in a compressed way
- Documents with the same signature are candidate pairs
- MinHash gives us a fast approximation to the result of using Jaccard similarities to compare all pairs of documents
MinHashing
Hash each column C to a small signature h(C), such that:
- h(C) is small enough that the signature fits in RAM
- highly similar documents usually have the same signature
Given a set of shingles, { (”the cat”), (”cat is)”, (”is glad”) }
- We have a hash function h that maps each shingle to an integer: h(“the cat”) = 12, h(“cat is”) = 74, h(“is glad”) = 48
- Then compute the minimum of these: min(12, 74, 48) = 12
Key property: the probability that two documents have the same MinHash signature is equal to their Jaccard similarity!
Candidate pairs: the documents with the same final signature are “candidate pairs”. We can either directly use them as our final output, or compare them one by one to check if they are actually similar pairs.
Extension to multiple hashes: in practice, we usually use multiple hash functions (e.g. N=100), and generate N signatures for each document. “Candidate pairs” can be defined as those matching a ‘sufficient number’ (e.g. at least 50) among these signatures.
MapReduce Implementation
Map:
- Read over the document and extract its shingles
- Hash each shingle and take the min of them to get the MinHash signature
- Emit
<signature, document_id>
Reduce:
- Receive all documents with a given MinHash signature
- Generate all candidate pairs from these documents
- (Optional): compare each such pair to check if they are actually similar
Clustering
K-Means Algorithm
- Initialization: Pick K random points as centers
- Repeat:
- Assignment: assign each point to nearest cluster
- Update: move each cluster center to average of its assigned points Stop if no assignments change
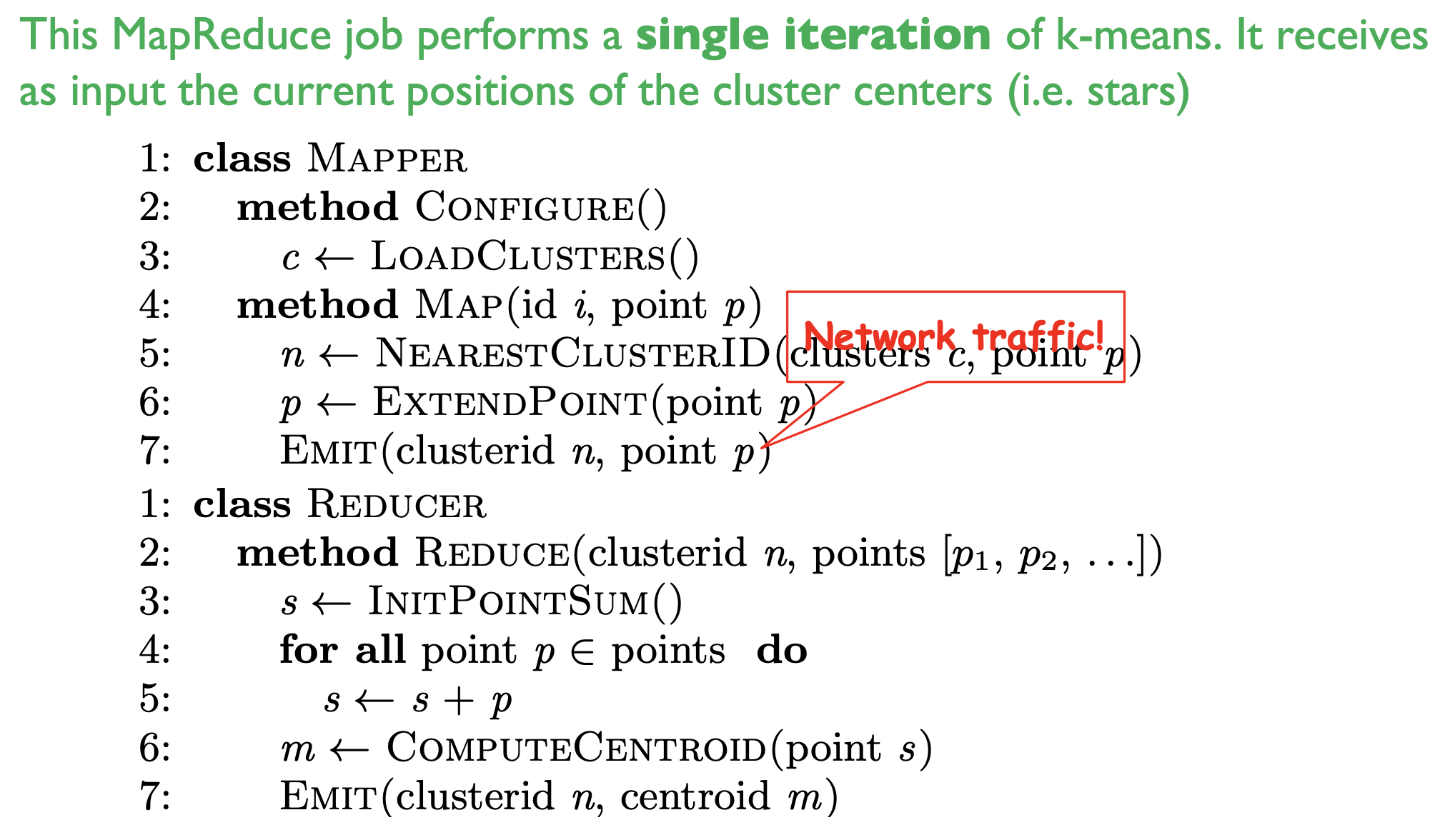
MapReduce implementation v1
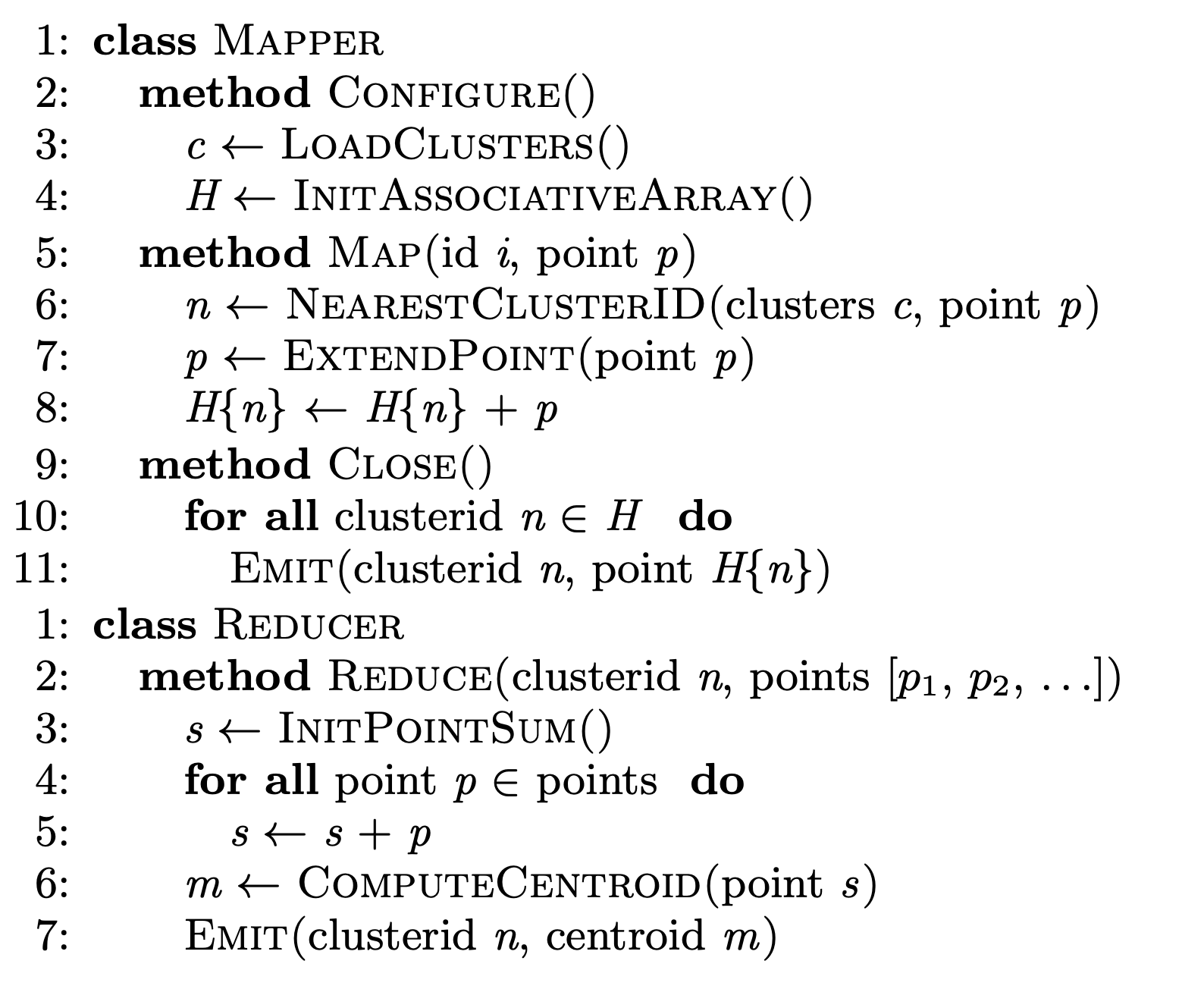
MapReduce implementation v2 (with in-mapper combiner)
NoSQL
Not Only SQL
- Key-Value store: Redis
- Document store: MongoDB
- Wide column databases: Cassandra
- Graph databases: Neo4j
Key-value stores
Stores associations between keys and values Keys are usually primitives and can be queried
- For example, ints, strings, raw bytes, etc.
Values can be primitive or complex; usually cannot be queried
- Examples: ints, strings, lists, JSON, HTML fragments, BLOB (basic large object), etc.
Non-persistent: Just a big in-memory hash table
- Examples: Memcached, Redis (But these can also backup the data to disk periodically)
Persistent: Data is stored persistently to disk
- Examples: RocksDB, Dynamo, Riak
Document stores
A database can have multiple collections
Collections have multiple documents
A document is a JSON-like object: it has fields and values
- Different documents can have different fields
- Can be nested: i.e.JSON objects as values
Unlike (basic) key value stores, document stores allow some querying based on the content of a document
Wide column stores
Rows describe entities
Related groups of columns are grouped as column families
Sparsity: if a column is not used for a row, it doesn’t use space
Examples: BigTable, Cassandra, HBase
Strong vs Eventual Consistency
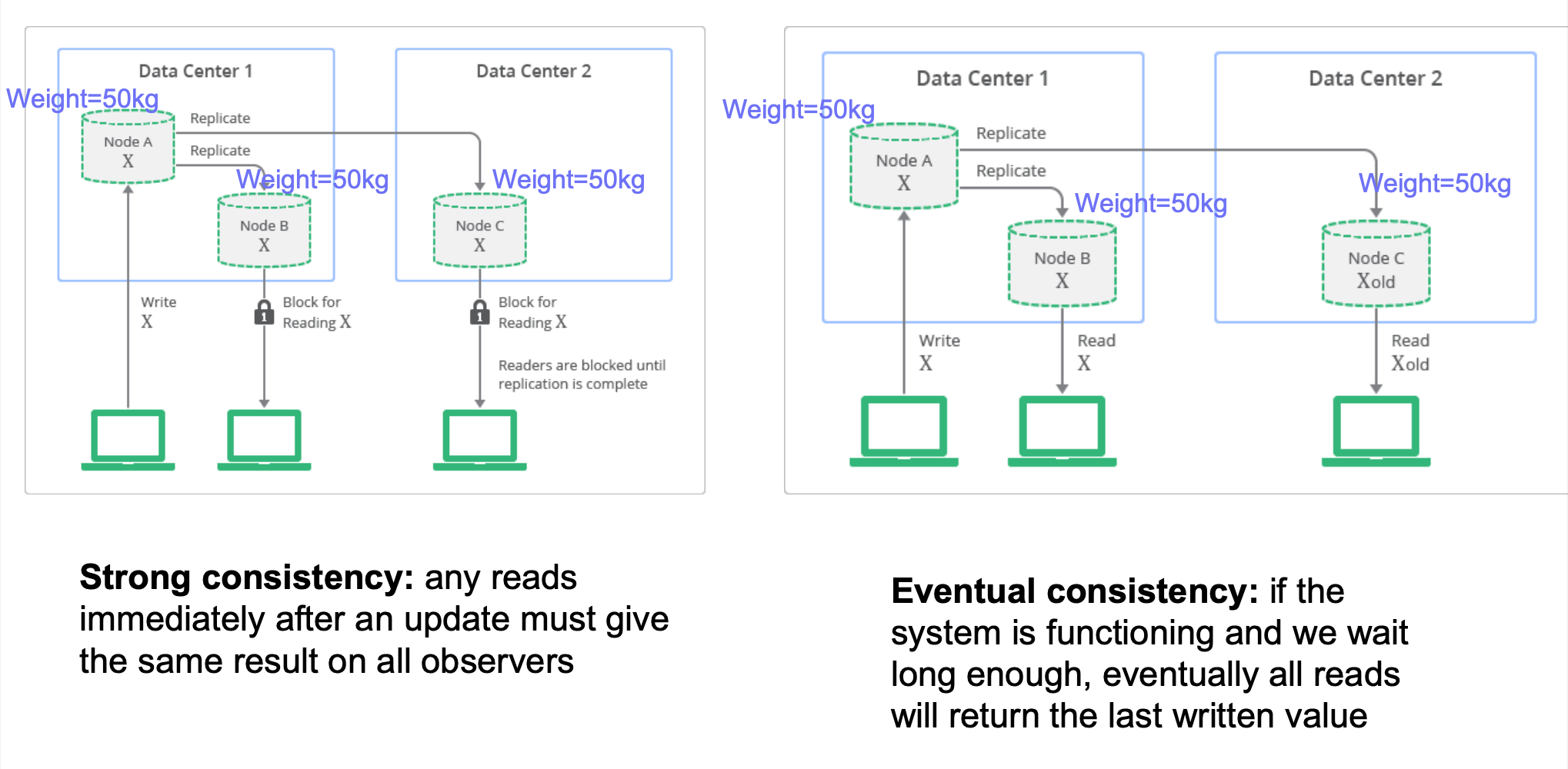
ACID vs BASE: Relational DBMS provide stronger (ACID) guarantees, but many NoSQL system relax this to weaker “BASE” approach:
- Basically Available: basic reading and writing operations are available most of the time
- Soft State: without guarantees, we only have some probability of knowing the state at any time
- Eventually Consistent: Contrast to “strong consistency”:
Implications: eventual consistency offers better availability at the cost of a much weaker consistency guarantee. This may be acceptable for some applications (e.g. statistical queries, tweets, social network feed, …) but not for others (e.g. financial transactions)
- Note that while NoSQL systems allow for weaker consistency guarantees, many more recent systems / versions are often configurable, i.e. can be configured for multiple different consistency levels (including strong) – ‘tunable consistency’
Pros and cons of NoSQL Systems
Pros:
- Flexible/dynamic schema: suitable for less well-structured data
- Horizontal scalability: we will discuss this more next week
- High performance and availability: due to their relaxed consistency model and fast reads/writes
Cons:
- No declarative query language: query logic (e.g. joins) may have to be handled on the application side, which can add additional programming
- Weaker consistency guarantees: application may receive stale data that may need to be handled on the application side
NoSQL and Basics of Distributed Databases
Distributed Database Architectures
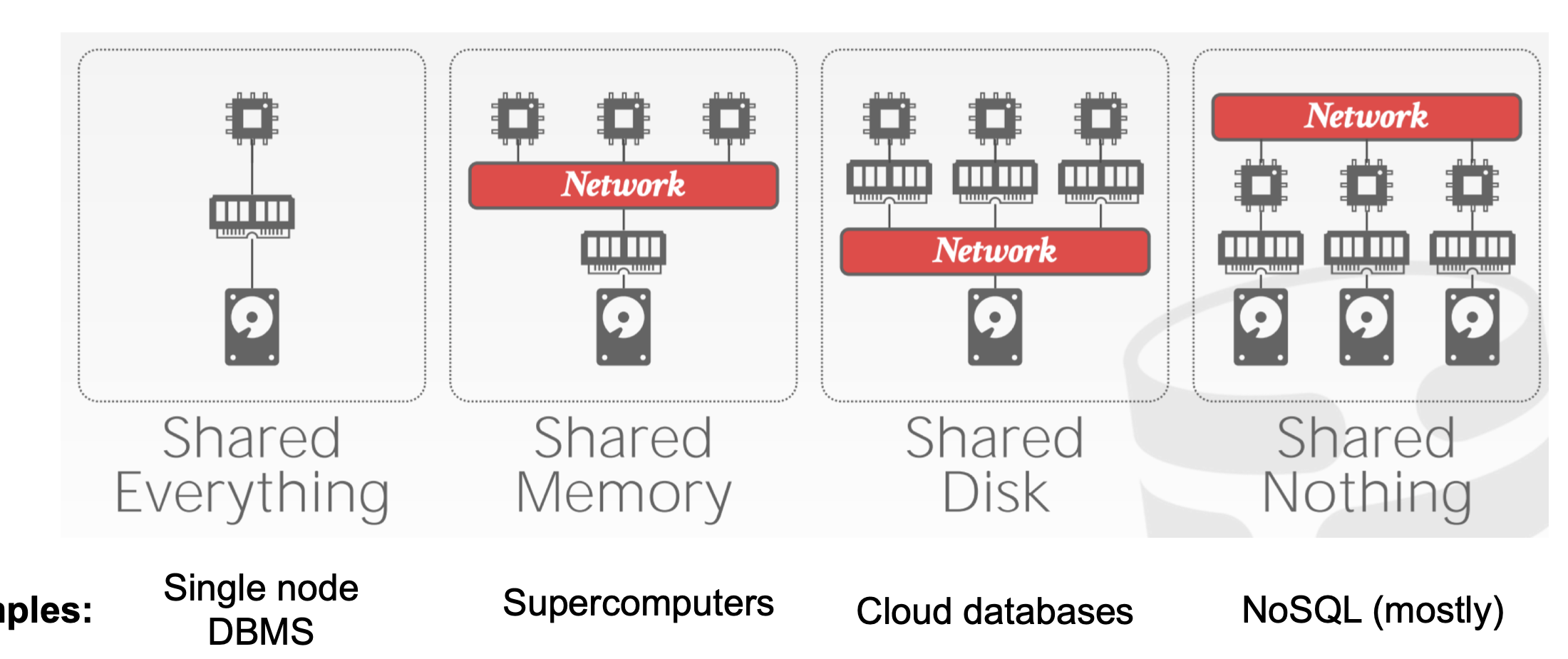
Table partitioning
Put different tables (or collections) on different machines
Problem: scalability – each table cannot be split across multiple machines
Horizontal Partitioning (Sharding)
Different tuples are stored in different nodes
Partition Key (or “shard key”) is the variable used to decide which node each tuple will be stored on: tuples with the same shard key will be on the same node
- How to choose partition key? If we often need to filter tuples based on a column, or “group by” a column, then that column is a suitable partition key
- Example: if we filter tuples by
user_id=100, anduser_idis the partition key, then all theuser_id=100data will be on the same partition. Data from other partitions can be ignored (called ‘partition pruning’), which saves time as we don’t have to scan these tuples.
Imagine using each user’s city, city_id as a partition key; when is this good / bad?
- good if we mostly aggregate data only within individual cities. Bad if there are too few cities (or cities are very imbalanced) and this causes a lack of scalability.
Range partition
Split partition key based on range of values
- Beneficial if we need range-based queries. In the above example, if the user queries for
user_id < 50, all the data in partition 2 can be ignored (‘partition pruning’); this saves a lot of work - But: range partitioning can lead to imbalanced shards, e.g. if many rows have
user_id = 0 - Splitting the range is automatically handled by a balancer (it tries to keep the shards balanced)
Hash partition
Hash partition key, then divide that into partitions based on ranges
- Hash function automatically spreads out partition key values roughly evenly
In previous approaches, how to add / remove a node? If we completely redo the partition, a lot of data may have to be moved around, which is inefficient.
- Answer: consistent hashing
Consistent hashing
Think of the output of the hash function as lying on a circle:
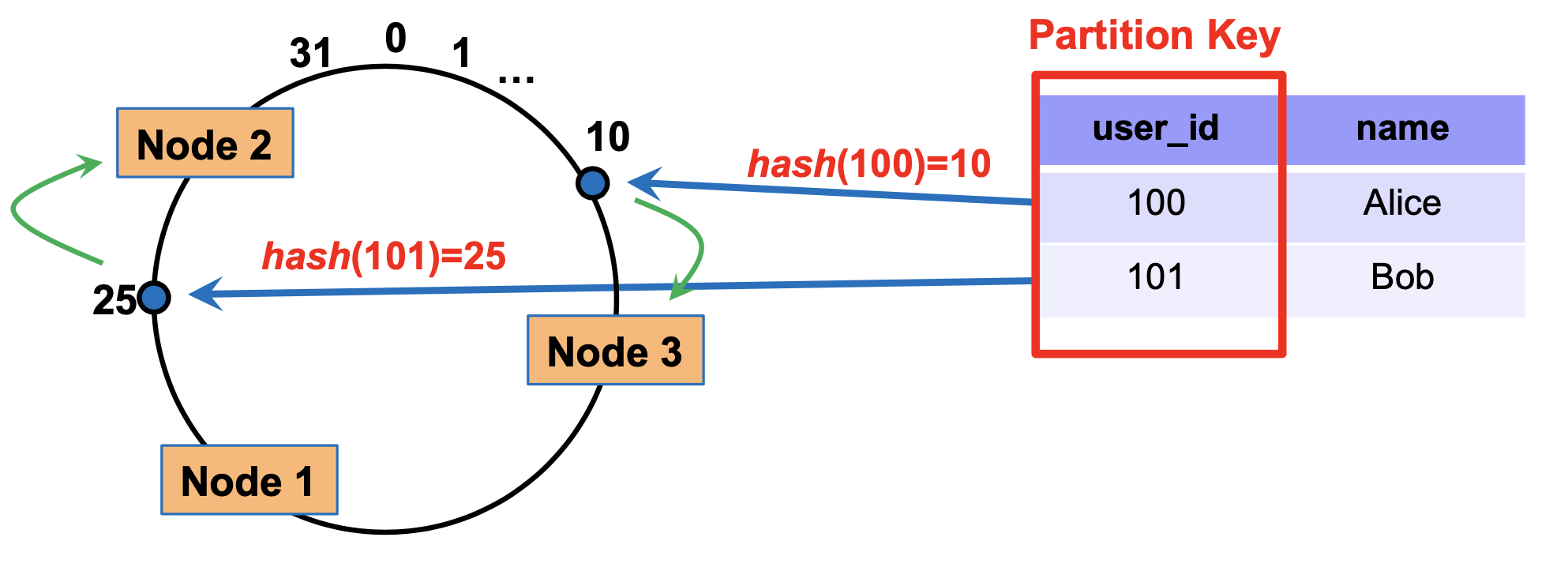
How to partition: each node has a ‘marker’ (rectangles)
Each tuple is placed on the circle, and assigned to the node that comes clockwise after it
To delete a node, we simply re-assign all its tuples to the node clock-wise after this one
Similarly, nodes can be added by splitting the largest current node into two
Simple replication strategy: replicate a tuple in the next few (e.g. 2) additional nodes clockwise after the primary node used to store it
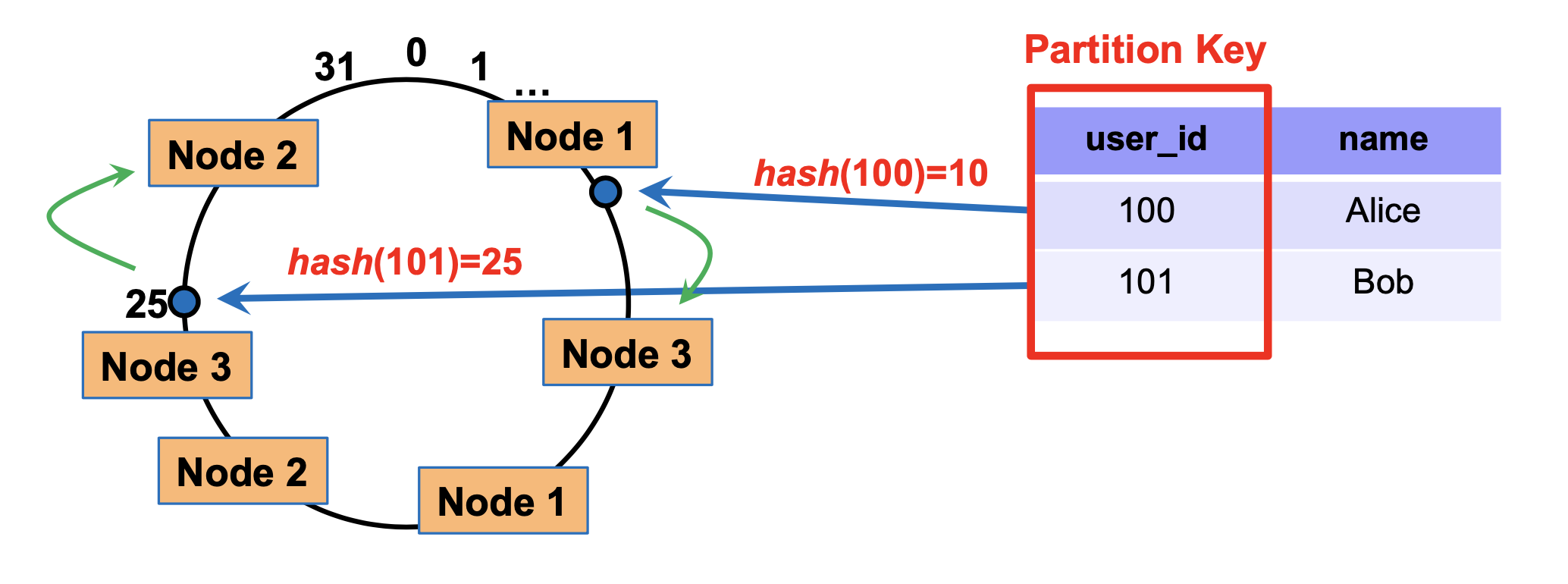
Multiple markers: we can also have multiple markers per node. For each tuple, we still assign it to the marker nearest to it in the clockwise direction.
Benefit: when we remove a node (e.g. node 1), its tuples will not allbe reassigned to the same node. So, this can balance load better.
Query processing in NoSQL
Architecture of MongoDB
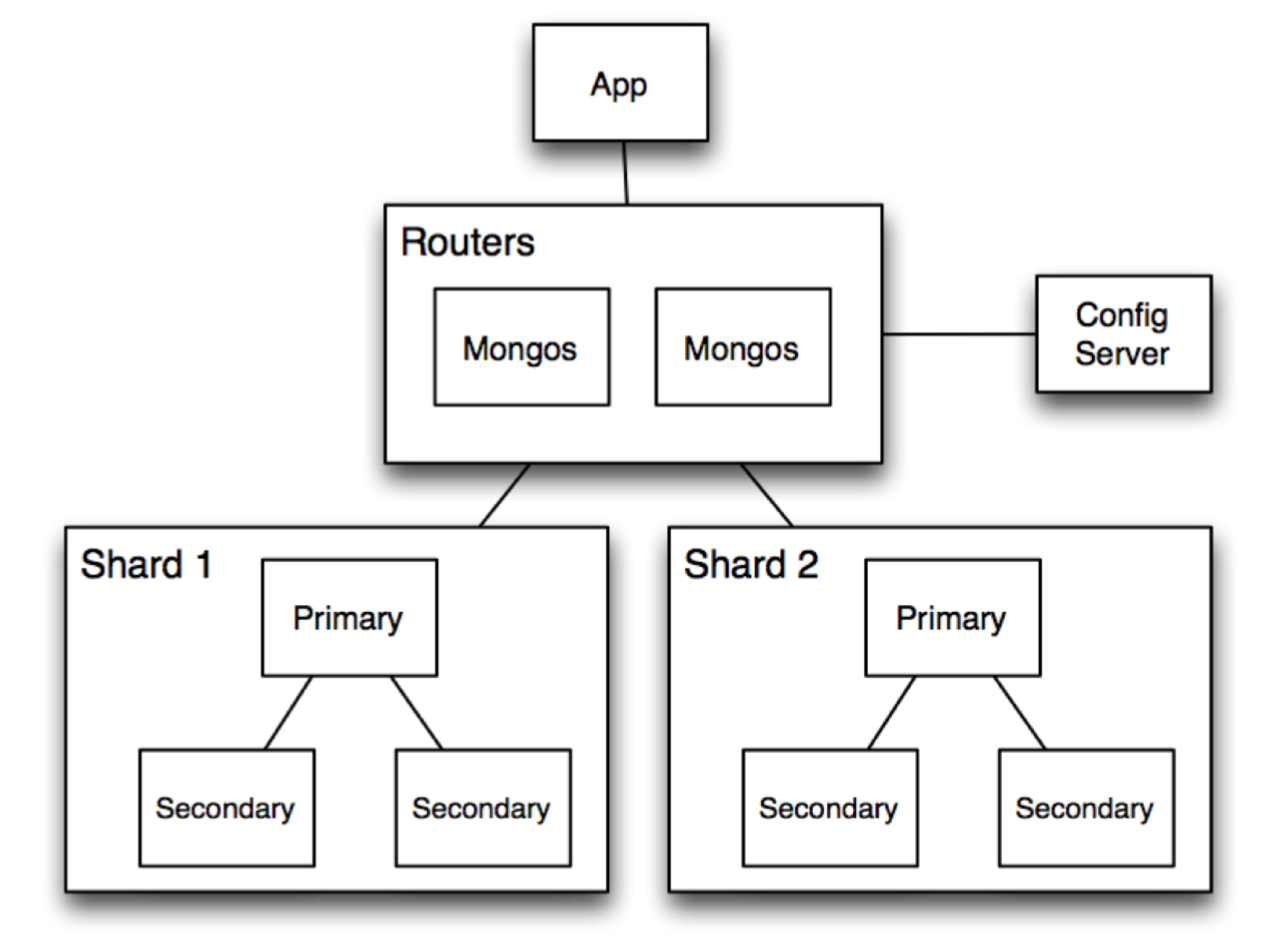
Routers (mongos): handle requests from application and route the queries to correct shards
Config Server: stores metadata about which data is on which shard
Shards: store data, and run queries on their data
Example of Read or Write Query
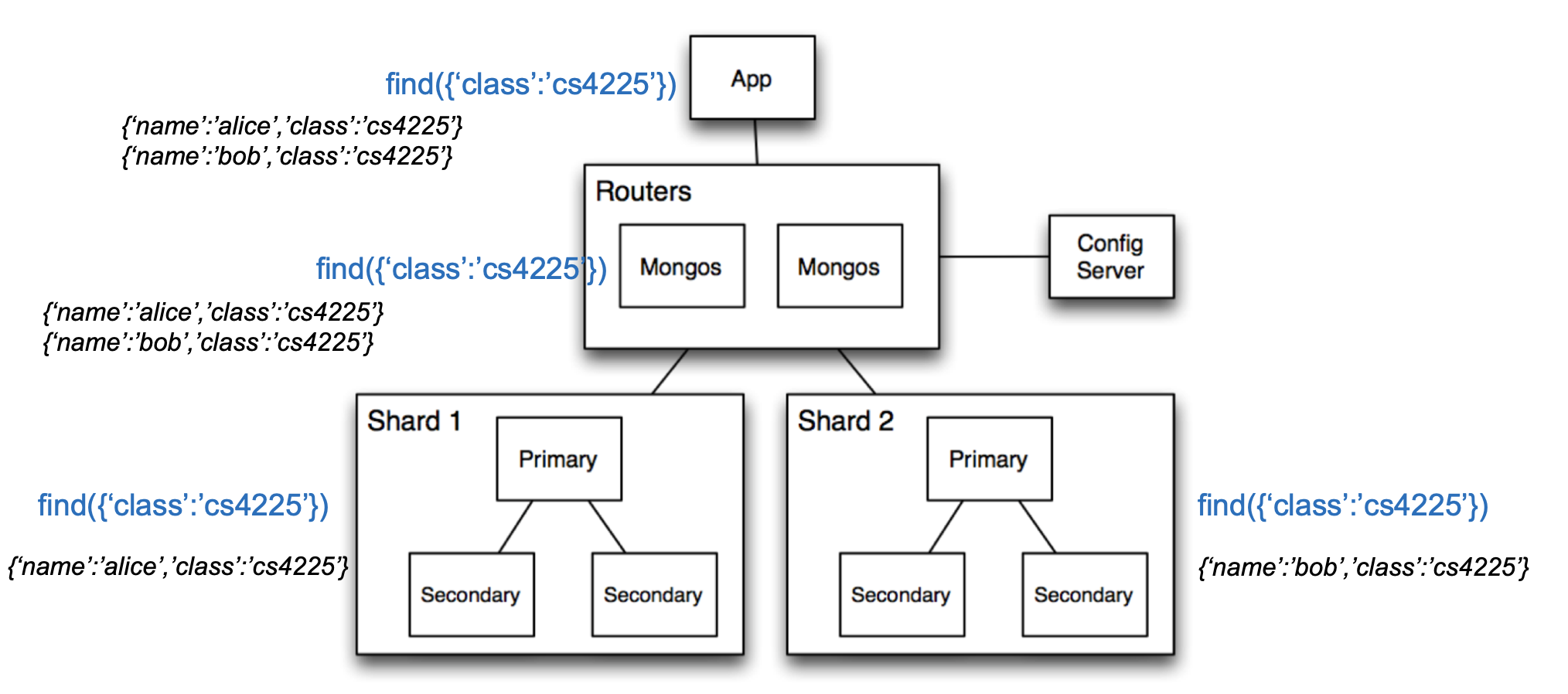
- Query is issued to a router (mongos) instance
- With help of config server, mongos determines which shards should be queried
- Query is sent to relevant shards
- Shards run query on their data, and send results back to mongos
- mongos merges the query results and returns the merged results
Reasons for Scalability & Performance of NoSQL
Horizontal partitioning: as we get more and more data, we can simply partition it into more and more shards (even if individual tables become very large)
- Horizontal partitioning improves speed due to parallelization.
Duplication: Unlike relational DBs where queries may require looking up multiple tables (joins), using duplication in NoSQL allows queries to go to only 1 collection.
Relaxed consistency guarantees: prioritize availability over consistency – can return slightly stale data